Awesome
AR4 ROS Driver
ROS 2 driver of the AR4 robot arm from Annin Robotics. Tested with ROS 2 Jazzy on Ubuntu 24.04. Also supports ROS 2 Iron using this branch
Supports:
- AR4 (Original version)
- AR4 MK2
- AR4 MK3
- AR4 servo gripper
Features:
- Moveit control (GUI and Python interface example)
- Gazebo simulation
- Hand-Eye calibration
This is a refresh of ar3_core.
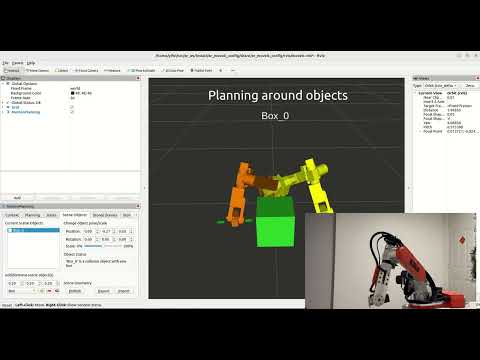
Video Demo:
Motion Planning using RViz and Moveit:
Startup, Calibration, and Servo Gripper Demo
Overview
- annin_ar4_description
- Hardware description of arm & servo gripper urdf.
- annin_ar4_driver
- ROS interfaces for the arm and servo gripper drivers, built on the ros2_control framework.
- Manages joint offsets, limits and conversion between joint and actuator messages.
- Handles communication with the microcontrollers.
- annin_ar4_firmware
- Firmware for the Teensy and Arduino Nano microcontrollers.
- annin_ar4_moveit_config
- MoveIt module for motion planning.
- Controlling the arm and servo gripper through Rviz.
- annin_ar4_gazebo
- Simulation on Gazebo.
Installation
- Install ROS 2 Jazzy for Ubuntu 24.04
- Clone this repository:
git clone https://github.com/ycheng517/ar4_ros_driver - Install workspace dependencies:
rosdep install --from-paths . --ignore-src -r -y - Build the workspace:
colcon build - Source the workspace:
source install/setup.bash - Enable serial port access if you haven't already done so:
You will need to log out and back in for changes to take effect.sudo addgroup $USER dialout
Firmware Flashing
The Teensy and Arduino Nano sketches provided in annin_ar4_firmware are compatible with the default hardware. To flash it, follow the same procedure as specified in AR4 Robot Setup.
[Optional] Running in Docker Container
A docker container and run script has been provided that can be used to run the robot and any GUI programs. It requires rocker to be installed. Then you can start the docker container with:
docker build -t ar4_ros_driver .
# Adjust the volume mounting and devices based on your project and hardware
rocker --ssh --x11 \
--devices /dev/ttyUSB0 /ttyACM0 \
--volume $(pwd):/ar4_ws/src/ar4_ros_driver -- \
ar4_ros_driver bash
Usage
There are two modules that you will always need to run:
-
Arm module - this can be for either a real-world or simulated arm
- For controlling the real-world arm, you will need to run the
annin_ar4_drivermodule - For the simulated arm, you will need to run the
annin_ar4_gazebomodule - Either of the modules will load the necessary hardware descriptions for MoveIt
- For controlling the real-world arm, you will need to run the
-
MoveIt module - the
annin_ar4_moveit_configmodule provides the MoveIt interface and RViz GUI.
The various use cases of the modules and instructions to run them are described below:
MoveIt Demo in RViz
If you are unfamiliar with MoveIt, it is recommended to start with this to explore planning with MoveIt in RViz. This contains neither a real-world nor a simulated arm but just a model loaded within RViz for visualisation.
The robot description, moveit interface and RViz will all be loaded in the single demo launch file
ros2 launch annin_ar4_moveit_config demo.launch.py
Control real-world arm with MoveIt in RViz
Start the annin_ar4_driver module, which will load configs and the robot description:
ros2 launch annin_ar4_driver driver.launch.py calibrate:=True
Available Launch Arguments:
ar_model: The model of the AR4. Options aremk1,mk2, ormk3. Defaults tomk3.calibrate: Whether to calibrate the robot arm (determine the absolute position of each joint).include_gripper: Whether to include the servo gripper. Defaults to:include_gripper:=True.serial_port: Serial port of the Teensy board. Defaults to:serial_port:=/dev/ttyACM0.arduino_serial_port: Serial port of the Arduino Nano board. Defaults toarduino_serial_port:=/dev/ttyUSB0.
⚠️📏 Note: Calibration is required after flashing firmware to the Teensy board, and
power cycling the robot and/or the Teensy board. It can be skipped in subsequent
runs with calibrate:=False.
Start MoveIt and RViz:
ros2 launch annin_ar4_moveit_config moveit.launch.py
Available Launch Arguments:
ar_model: The model of the AR4. Options aremk1,mk2, ormk3. Defaults tomk3.include_gripper: Whether to include the servo gripper. Defaults to:include_gripper:=True.use_sim_time: Make Moveit use simulation time. Should only be enabled when running with Gazebo. Defaults to:use_sim_time:=False.
You can now plan in RViz and control the real-world arm. Joint commands and joint states will be updated through the hardware interface.
NOTE: At any point you may interrupt the robot movement by pressing the E-Stop button on the robot. This would abruptly stop the robot motion! To reset the E-Stop state of the robot use the following command
ros2 run annin_ar4_driver reset_estop.sh <AR_MODEL>
where <AR_MODEL> is the model of the AR4, one of mk1, mk2, or mk3
Control simulated arm in Gazebo with MoveIt in RViz
Start the annin_ar4_gazebo module, which will start the Gazebo simulator and load the robot description.
ros2 launch annin_ar4_gazebo gazebo.launch.py
Start Moveit and RViz:
ros2 launch annin_ar4_moveit_config moveit.launch.py use_sim_time:=true include_gripper:=True
You can now plan in RViz and control the simulated arm.
Hand-Eye Calibration
Tuning and Tweaks
Tuning Joint Offsets
If for some reason your robot's joint positions appear misaligned after moving to the home position, you can adjust the joint offsets in the joint_offsets/ config folder. Select and modify the YAML file corresponding to your AR model to fine-tune the joint positions.
Switching to Position Control
By default this repo uses velocity-based joint trajectory control. It allows the arm to move a lot faster and the arm movement is also a lot smoother. If for any
reason you'd like to use the simpler classic position-only control mode, you can
set velocity_control_enabled: false in driver.yaml. Note that you'll need to reduce velocity and acceleration scaling in order for larger motions to succeed.
Demo Project (and Python Interface Usage)
See: Tabletop Handybot for a demo of using PyMoveit2 to interface with this driver