Awesome

Thea
A toolkit for visual computing with a focus on geometry processing, especially for interactive 3D modeling applications.
Source code is available at https://github.com/sidch/Thea.<br/>
Author: Siddhartha Chaudhuri. Released under the BSD license (see LICENSE.txt).
If you find a bug, please let me know promptly. Thank you!
!!! Important Notes !!!
- Thea now requires C++17 compiler and standard library support. Benefits include no dependence on Boost (and hence a new Lite mode whose only external dependency is Eigen), no deprecated cruft for cross-platform timing functions, etc. If your compiler doesn't support C++17, the last commit you can use is f945b01.
- If you last cloned this repository before Sep 19, 2021, please delete your local copy and re-clone a fresh copy. Some history was rewritten during a cleanup and commit refs have changed. If you just do a
git pullwithout deleting and re-cloning, bad things can happen when the old and new histories get merged (Git will hopefully warn you about this). - The default branch is now called
maininstead ofmaster, to be more inclusive (https://github.com/github/renaming/). To update your local copy, run the following commands:
git branch -m master main
git fetch origin
git branch -u origin/main main
git remote set-head origin -a
What is Thea?
Thea is a library of C++ classes for computer graphics, primarily for 3D geometry processing. It is the core library I use for nearly all my research projects, and it is also the core library for Adobe Fuse, which I originally authored. As such, it is developed for personal use and its features reflect this: please do not write to me to asking for specific features to be included. However, over time, it has become quite general-purpose. Among its features are:
- Polygon mesh classes with arbitrary per-element attributes, including heavyweight ones that store full mesh topology and a lightweight one designed only for rendering.
- General linear algebra via Eigen, geometric transformations (e.g. rigid transforms), several additional convenience functions and classes (e.g. to wrap raw buffers as matrices), and easy-to-use interfaces to various solver packages (Eigen, NNLS, CSPARSE, ARPACK).
- 2, 3 and N-dimensional geometric primitives, including lines, line segments, rays, (hyper)planes, triangles (+ ray-triangle and triangle-triangle intersections), balls, axis-aligned boxes, oriented boxes, polygons and spline curves (+ fast spline-fitting to points).
- An eclectic collection of algorithms, including fast N-dimensional bounding volume hierarchies (on points or mesh triangles), shortest paths in graphs, best-fit boxes and ellipsoids, singular value decomposition and PCA, iterative closest point (ICP), symmetry detection, convex hulls, connected components, surface parametrization (global and local), discrete Laplace-Beltrami operators, sampling points from meshes, mesh features (curvature, distance histogram, shape diameter, spin image), and some machine learning models.
- Basic image processing (wrapper for FreeImage, or stb in Lite mode).
- A plugin architecture and included plugins providing easy interfaces to OpenGL, ARPACK and CSPARSE. The OpenGL plugin optionally (and easily) compiles with an OSMesa driver to automatically create a headless CPU-only context.
- Pure virtual wrappers for several common classes (e.g. dense and sparse matrices, images) that allow safely passing such objects across shared library boundaries.
- A variety of utility classes for filesystem navigation, I/O, serialization, timing, synchronization, hashing, logging, string manipulation/searching, memory allocation, bounded/sorted arrays, pseudo-random numbers, mathematics (including algebraic roots of polynomials upto degree 4) etc.
- Several bundled tools written using the library, for 3D file viewing and annotation (Browse3D); offline rendering (RenderShape); mesh sampling (MeshSample), repair (MeshFix, different from this one), features (MeshLocalFeatures, MeshGlobalFeatures) and format conversion (MeshConv); rigid (ShapeAlign) and non-rigid (Register) shape registration; k-NN graphs of surface samples (SampleGraph) etc.
- A stripped-down "Lite" mode whose only external dependency is Eigen. In this mode, you lose some extra image formats from FreeImage (a bundled stb backend is used instead), and a couple of features that depend on CGAL (but there are alternatives). The plugins (which may have their own external dependencies) are omitted by default in this mode, but can be optionally included.
Thea is constantly under development and a few parts are incomplete. Use at your own risk! I do not provide any support (unless you have bugs to report), and I make no correctness or robustness guarantees for any part of the code. Parts of the library are reasonably battle-tested (e.g. in Fuse), and parts are one-off inclusions rarely used in anger or tested thoroughly.
Thea is heavily influenced by Morgan McGuire's G3D library. It started out as an extension of G3D and still has significant chunks of code adapted from it (e.g. for binary/text I/O, plugin management, the rendersystem interface and OpenGL plugin, color handling, quaternions, CRC32, atomic integers, and random numbers).
The Thea library is not related to the independently and contemporaneously developed Thea Render photorealistic rendering engine.
Coding
Design principles
Thea has a particular focus on being a foundation layer for interactive 3D modeling applications. It is written in standards-compliant C++17 for speed, and is designed with the following objectives in mind:
- Optimize for ease of use
- Clean, simple APIs are essential
- Everything should be well-documented
- Except where some complexity is unavoidable for speed
- Even then, keep thing simple
- Reuse code as much possible
- E.g. with minimal external support (simple traits classes), a single BVH class (
BvhN) can efficiently support any bounded objects in any-dimensional space under any metric
- E.g. with minimal external support (simple traits classes), a single BVH class (
- Templates are ok, but only if tastefully used
- Use when every other option is much worse
- Provide sensible defaults
- Typedef common specializations (
Vector3 = Eigen::Matrix<Real, 3, 1, MatrixLayout::COLUMN_MAJOR | Eigen::DontAlign>) enable_if+type_traitsis often better than polymorphism
There are a few more specific design choices that apply to specific submodules. Since Thea focuses on interactive 3D modeling, the main mesh class (GeneralMesh) is optimized for fast local updates on the CPU, with low-overhead synchronization with the GPU. Specifically:
- All references are pointers to persistent locations, not indices
- Vertex/face/edge lists are std::list
- Pass a custom pooled allocator if you want fast small allocs and memory coherence
- Topology changes are fast (no large reallocs)
- GPU updates are fine-grained (but could be more so)
- Only affected buffers are updated, in lazy batches
Contrast this with libraries optimized for static geometry and/or global processing passes, e.g. trimesh2 or libigl, which represent meshes as dense arrays of elements, referenced by integer indices. Of course, Thea also has another mesh class (DisplayMesh) which has similar behaviour and is a good choice for more static applications, as well as a halfedge data structure (DcelMesh). In conjunction, Thea's bounding volume hierarchy class (BvhN), used to detect UI interactions with a mesh, tries to minimize the latency of recomputing the tree after the underlying geometry is changed.
Examples
Here is a simple "Hello World" example:
#include <Thea/MatVec.hpp>
int main(int argc, char * argv[])
{
using namespace Thea;
Vector3 v(1.0, 2.0, 3.0);
Matrix3 m = Math::rotationArc(Vector3(1, 0, 0), Vector3(0, 1, 0));
// Automatically adds newline and synchronization to std::cout...
THEA_CONSOLE << "Hello world! The product is " << toString(m * v);
}
Here is a more complicated example, to perform 3D shape remeshing. We will do this in four steps:
- Load an input polygon mesh
- Create a signed distance field
- Pass this to an implicit surface mesher
- Save the output mesh
Let's see the code for these steps one at a time. For simplicity, we'll omit some generic boilerplate code and #include directives, and assume
using namespace Thea;
using namespace Algorithms;
using namespace Graphics;
commands have been issued in advance.
First, we will load the input mesh:
// Read the input mesh
typedef GeneralMesh<> Mesh;
MeshGroup<Mesh> m("Input");
m.load("source.obj");
A MeshGroup is a hierarchical collection of meshes, encoding a scene graph. This matches the structure of most general-purpose mesh formats. A GeneralMesh object represents a node of this graph, packing vertex, edge and face information for a single component.
Next, we'll create a "functor" class that evaluates a signed distance field around the shape. It returns 0 for points on the surface of the shape, positive values for points outside the shape boundary, and negative values for points inside the shape boundary.
// Assumes consistent outward normals, and no nested structures.
class SignedDistance
{
public:
// Constructor.
SignedDistance(MeshGroup<Mesh> & m) : num_calls(0)
{
bvh.add(m);
bvh.init();
bvh.enableNearestNeighborAcceleration();
}
// Evaluate the signed distance from a given point.
Real operator()(Vector3 const & p) const
{
num_calls++;
double d; Vector3 cp;
auto index = bvh.closestElement<MetricL2>(p, -1, &d, &cp);
Vector3 cn = bvh.getElements()[index].getNormal();
return cn.dot(cp - p) < 0 ? d : -d;
}
// How many times was the bvh queried?
intx numCalls() const { return num_calls; }
private:
MeshBvh<Mesh> bvh;
mutable intx num_calls;
};
Note that we are using a convenient specialization of the general bounding volume hierarchy class (BvhN) for polygon meshes, for which we enable acceleration of nearest neighbor queries using a proxy BVH of sample points. The computation and use of this internal acceleration structure is abstracted away behind a single function call. Also, Thea supports the L2 distance metric by default, but the BVH can take any other metric as a template argument, and limit the search to a maximum distance. intx is Thea's default integer type used for indexing, defined as std::ptrdiff_t.
Now, we'll do the actual remeshing:
// Setup the remeshing
Mesh::Ptr remeshed(new Mesh);
SignedDistance sd(m);
// Compute the bounding sphere, for a remeshing range and a scale parameter
BestFitSphereN<3> bounds;
PointCollectorN< BestFitSphereN<3>, 3 > c(&bounds);
c.addMeshVertices(m);
// Set a remeshing precision
int precision = 100;
// Do the remeshing (and time it)
Stopwatch timer;
timer.tick();
ImplicitSurfaceMesher::Options::Bloomenthal opts(
/* cell_size = */ bounds.getDiameter() / precision,
/* max_search_steps = */ precision);
ImplicitSurfaceMesher::meshBloomenthal(
&sd,
bounds.getBall(),
c.vertices[0]->getPosition(),
opts,
*remeshed);
timer.tock();
THEA_CONSOLE << sd.numCalls() << " BVH NN queries in "
<< 1000 * timer.elapsedTime() / sd.numCalls() << "ms each";
Stopwatch is one of many utility classes. ImplicitSurfaceMesher also optionally wraps CGAL's Boissonnat-Oudot polygonizer. THEA_CONSOLE is an object that behaves exactly like std::cout but automatically adds a newline at the end. THEA_WARNING and THEA_ERROR also prefix the line with the current time, source filename, line number, and a warning/error flag.
Finally, we'll save the output mesh:
// Save the output mesh
MeshGroup<Mesh> out("Remeshed");
out.addMesh(remeshed);
out.save("remeshed.obj");
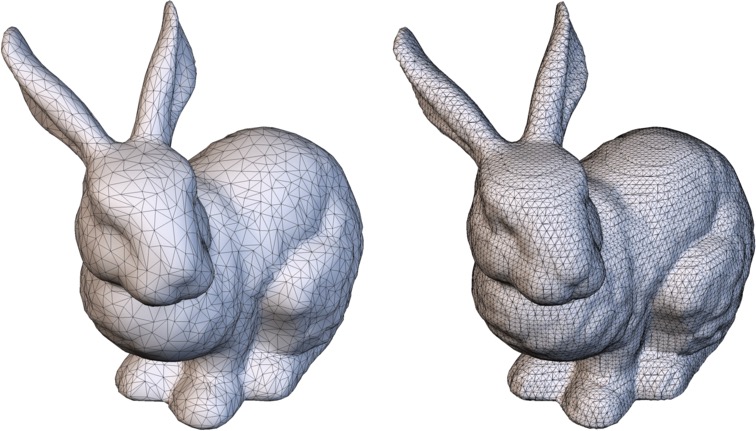
Figure: (Left) Input mesh. (Right) After remeshing. Artifacts are because of the specific (Bloomenthal) polygonizer used. Thea's bundled RenderShape utility was used to render these images.
Here is a complete, compilable version of the above example: remesh.cpp
For some real-world samples, see the applications in the Thea/Code/Source/Tools folder.
Installation
Thea is written in standards-compliant C++17, and should compile with any recent compiler on Mac, Linux and Windows. It uses CMake as a cross-platform buildsystem. However, I do not normally work on Windows, and do not currently provide build instructions for this platform. I have successfully done Windows builds in the past and there is no reason why it should not work with a bit of effort getting the dependencies installed. I will try to add full Windows instructions in the future, time permitting. Until then, building in Lite mode (and optionally enabling the OpenGL plugin) is probably the surest bet for quickly getting it working.
Installing the dependencies
Thea relies on Eigen (3.4 or later), and optionally on FreeImage, lib3ds, CGAL and CLUTO. The OpenGL plugin links to an OpenGL or OSMesa installation, and the ARPACK plugin to an ARPACK installation. A convenient script installs all of these (except OpenGL) on Unix-like systems (Mac and Linux), as follows. Both local (no root) and system-wide (needs root) installs are supported. You can omit all of these except Eigen if you're building Thea in the stripped-down Lite mode.
Assume $basedir is some directory where you're going to check out the source code, and $prefix is some directory where you'll install stuff (e.g. $basedir/Installations or /usr/local).
cd "$basedir"
git clone --recursive https://bitbucket.org/sidch/theadepsunix TheaDepsUnix
cd TheaDepsUnix/Source
For a local install (no root perms needed to write to $prefix):
./install-defaults.sh --with-wxwidgets --prefix "$prefix" -j4
For a system-wide install:
sudo ./install-defaults.sh --with-wxwidgets --use-root --prefix "$prefix" -j4
--use-root will try to use apt-get on Ubuntu/Debian, omit it if you want to build everything from scratch regardless. --with-wxwidgets is needed to build Browse3D, a bundled GUI application for viewing 3D files: it can be omitted if so desired. Add --with-osmesa to install OSMesa for headless CPU-only rendering (good for remote servers). Replace 4 with the actual number of hardware threads on your system, typically 2, 4, or 8.
(Note for macOS: Ideally, install-defaults.sh --use-root should use Homebrew/MacPorts on Mac. However, I have not added this yet because I'm swamped with other stuff. Until then, brew install eigen lib3ds freeimage arpack cgal wxwidgets will do the job and you don't need to run install-defaults.sh.)
The above step will install the necessary libraries by compiling them from source (if not apt-getable) and placing the result in $prefix. To install an individual library, call install.sh --with-<package> ... with the same --use-root, --prefix etc arguments as above. Carefully check for errors (warnings are generally ok). If there are errors, you probably need to explicitly install some third-party libraries/tools -- see the error messages -- and rerun the command. E.g. I have found some barebones server installs without the zlib or Expat development packages, required by Mesa: in this particular case, the source packages are included and you can use ./install.sh --with-expat --with-zlib .... Make sure there are no errors in the output before proceeding further.
Installing the Thea library, plugins and bundled tools
Assuming there were no errors while installing the dependencies, execute the following commands:
cd "$basedir"
git clone --recursive https://github.com/sidch/Thea
cd Thea/Code/Build
cmake -DCMAKE_INSTALL_PREFIX="$prefix" -DCMAKE_BUILD_TYPE=RelWithDebInfo .
make -j4
make install # add sudo if necessary
To build in Lite mode with no external dependencies except Eigen, add -DLITE=1 to the cmake command above. This will omit all external dependencies except Eigen. It will also omit building all the bundled plugins and tools. You can selectively re-include the latter with -DWITH_<MODULE>=1, where <MODULE> is any of TOOLS, PLUGIN_ARPACK, PLUGIN_CSPARSE and PLUGIN_GL. (The CSparse plugin doesn't actually have any external dependencies but is omitted by default in Lite mode for consistency.)
By default, CMake looks for the dependencies in the CMAKE_INSTALL_PREFIX directory. If for some reason the dependencies are located somewhere else, e.g. in $deps, you can point CMake to it by adding -DTHEA_DEPS_ROOT="$deps". The bundled tools are installed to $prefix/bin/Thea: add this to your executable search path (e.g. the system PATH variable) as needed. A quick way to check if everything has installed correctly (assuming OpenGL and wxWidgets are available) is to run
$prefix/bin/Thea/Browse3D ../../Data/Models/teapot.obj
and see if a window pops up displaying a 3D teapot, or
$prefix/bin/Thea/RenderShape ../../Data/Models/teapot.obj teapot.png 800 600
to render the teapot to an image file.
To build with OSMesa instead of the system OpenGL driver, add -DWITH_OSMESA=true to the CMake line above. The RenderShape tool will then use OSMesa. To run some test scripts (several probably out of date), run make test after building. To omit building the tests altogether, pass -DWITH_TESTS=false to CMake. To change the build type (by default Release), set -DCMAKE_BUILD_TYPE=Debug|Release|RelWithDebInfo.
Documentation
To generate HTML documentation for the API, run Doxygen in the Thea/Code/Documentation folder. Then, open html/index.html in a browser.
This is probably the best place to start looking at the toolkit.
Note that many convenience types, such as Vector3 and Matrix4, are typedefs (for Eigen::Matrix<Real, 3, 1, ...> and Eigen::Matrix<Real, 4, 4, ...> respectively) and don't show up in the Class Index. Some will show up in Namespaces --> Namespace Members --> Typedefs. For others, you will have to look at the source code. Documenting all of these properly is work-in-progress.)
Using the library
GCC/Clang-specific: You MUST compile with strict aliasing turned OFF. This is achieved with -fno-strict-aliasing. I also recommend -Wall -g2 -O2 (all "W"arnings, debu"g"gable binaries, "O"ptimize for speed). -O2 messes up the debugging a bit so turn it off temporarily if you can't track down your bug.
The usual command line to link your program with the library is:
c++ -std=c++17 -Wall -g2 -O2 -fno-strict-aliasing \
-I"$prefix/include" -I"$prefix/include/eigen3" \
<source-files> \
-L"$prefix/lib" -lThea \
-lfreeimageplus -lfreeimage -l3ds -lm \
[-ldl] [-framework Carbon]
(In Lite mode, you can omit all the dependencies except Eigen.)
If you're using CMake for your own code, a convenient FindThea.cmake module in Thea/Code/Build/Common/CMake/Modules (or directly from https://github.com/sidch/CMake) allows you to do FIND_PACKAGE(Thea), including locating all the necessary dependencies. See the header of that file for additional instructions.