Awesome
Official Repository of Semantic Synthesis of Pedestrian Locomotion and Generating Scenarios with Diverse Pedestrian Behaviors for Autonomous Vehicle Testing

Code for the papers Semantic Synthesis of Pedestrian Locomotion published at Asian Conference on Computer Vision (ACCV) 2020 and Generating Scenarios with Diverse Pedestrian Behaviors for Autonomous Vehicle Testing to be published at Conference on Robot Learning (CoRL) 2021.

You can find the paper Semantic Synthesis of Pedestrian Locomotion here, a spotlight video here, and a presentation of the paper here.
Authors: Maria Priisalu, Ciprian Paduraru, Aleksis Pirinen and Cristian Sminchisescu
<img src="https://github.com/MariaPriisalu/spl/blob/master/hit.gif" width="500"> <img src="https://github.com/MariaPriisalu/spl/blob/master/not_hit.gif" width="500">
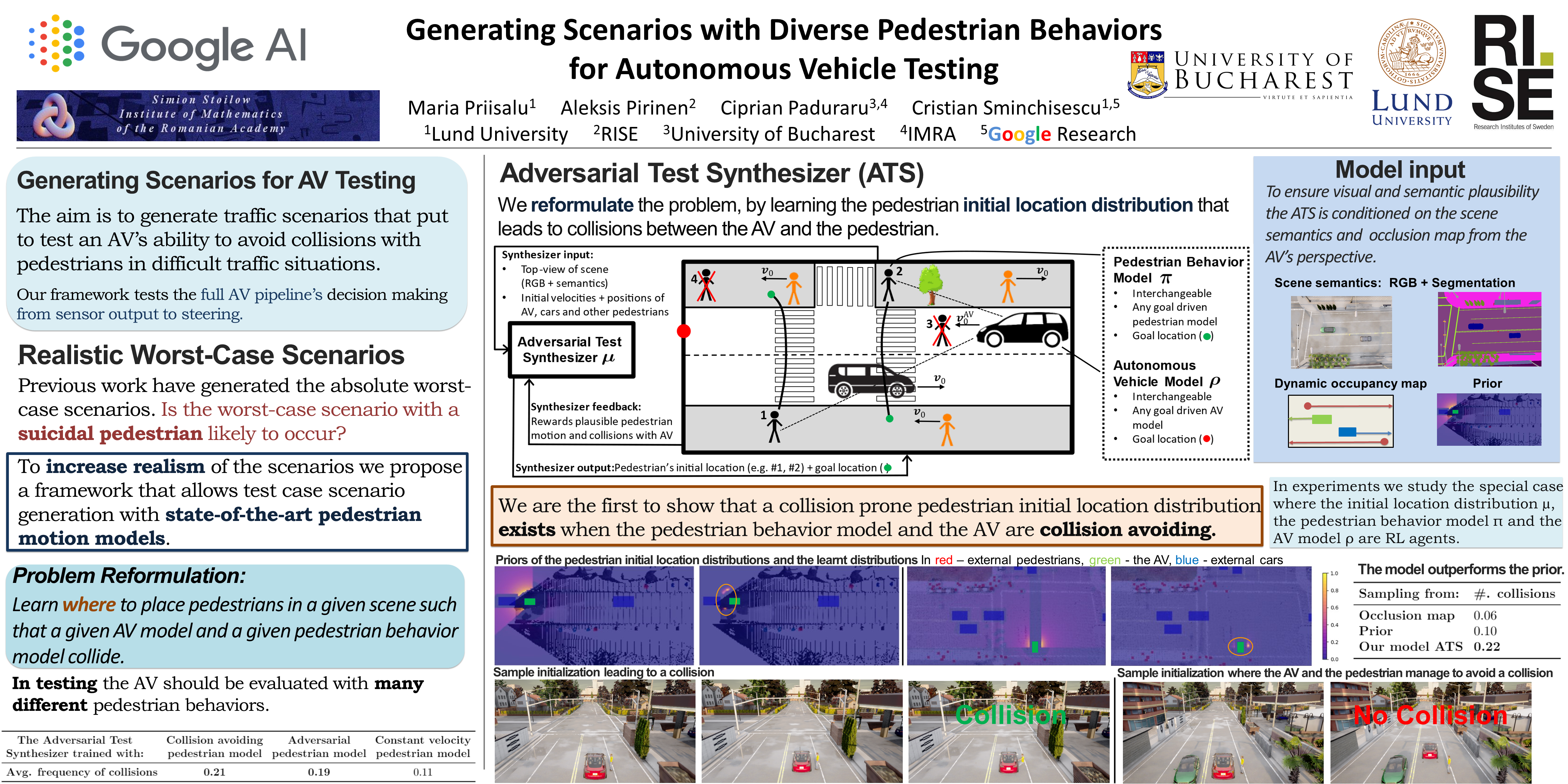
You can find the paper Generating Scenarios with Diverse Pedestrian Behaviors for Autonomous Vehicle Testing here and a a short video presentation. The CoRL 2021 poster can be seen below.
Authors: Maria Priisalu, Aleksis Pirinen, Ciprian Paduraru and Cristian Sminchisescu
The techincal report Semantic and Articulated Pedestrian Sensing Onboard a Moving Vehicle adresses the 3D reconstruction of the scene and the pedestrians in the Cityscapes dataset available here with supplementary video available at here.
Authors: Maria Priisalu
Overview
This repository contains code for training the Semantic Pedestrian Locomotion agent and the Adversarial Test Synthesizer.
The reinforcement learning logic and agents are in the folder RL.
The Semantic Pedestrian Locomotion policy gradient network with two 3D convolutional layers can be found in the class Seg_2d_min_softmax in net_sem_2d.py, and the Adversarial Test Synthesizer in the class InitializerNet in initializer_net.py.
The pedestrian agent's logic (moving after an action) can be found in the abstract class agent.py.
The class Episode is a container class. It contains the agent's actions, positions, and reward for the length of an episode.
The class Environment goes through different episode setups (different environments) and applies the agent in the method work.
Currently this class also contains the visualization of the agent.
The class test_episode.py contains unit tests for the initialization of an episode, and the different parts of the reward.
The class test_tensor contains unit tests for the 3D reconstruction needed for environment.
Other folders:
CARLA_simulation_client: CARLA Client code for gathering a CARLA dataset.
colmap: scripts utilizing a modified version of colmap.
commonUtils: The adapted PFNN code base and some environment descriptions.
Datasets: empty folder for gathered datasets.
licences: the licences of some of the libraries the repository uses.
localData: contains trained models in Models and experimental results in come_results.
localUserData: a directory structure to gather data from experiments.
tests: various unit tests.
triangulate_cityscapes: Reconstruction of the 3D RGB and Segmentation using cityscapes depthmaps and triangulation- not used in the paper.
utils: various utility functions
Running the code
To train a new model: from the main directory, type:
python RL/RLmain.py
To evaluate a model: from the main directory, type:
python RL/evaluate.py
To visualize results insert the timestamp of the run into RL/visualization_scripts/Visualize_evaluation.py
timestamps=[ "2021-10-27-21-14-35.842985"]
and run the file with
python RL/visualization_scripts/Visualize_evaluation.py
from spl/.
Licence
This work utilizes CARLA (MIT Licence), Waymo (Apache Licence), PFNN (free for academic use), COLMAP (new BSD licence), Cityscapes (the Cityscapes licence - free for non-profit use), GRFP (free for academic use), and PANet as well as the list of libraries in the yml file. The requirements of the licences that the work builds upon apply. Note that different licences may apply to different directories. We wish to allow the use of our repository in academia freely or as much as allowed by the licences of our dependencies. We provide no warranties on the code.
If you use this code in your academic work please cite one of the works,
@inproceedings{Priisalu_2020_ACCV,
author = {Priisalu, Maria and Paduraru, Ciprian and Pirinen, Aleksis and Sminchisescu, Cristian},
title = {Semantic Synthesis of Pedestrian Locomotion},
booktitle = {Proceedings of the Asian Conference on Computer Vision (ACCV)},
month = {November},
year = {2020}
}
@inproceedings{Priisalu_2021_CoRL,
author = {Priisalu, Maria and Pirinen, Aleksis and Paduraru, Ciprian and Sminchisescu, Cristian},
title = {Generating Scenarios with Diverse PedestrianBehaviors for Autonomous Vehicle Testing},
booktitle = {PMLR: Proceedings of CoRL 2021},
month = {November},
year = {2021}
}
Prerequisites
The models have been trained on Ubuntu 16.04, Tensorflow 1.15.04 (see official prerequists), python 3.7.7 on Nvidia Titan Xp.
Please see the yml file for the exact anaconda environment.
Note that pfnncharacter is a special library and must be installed by hand. See below.
Installation
Install the conda environment according to environment.yml
To install pfnncharacter enter commonUtils/PFNNBaseCode and follow the README.
Datasets
CARLA
In CARLA 0.8.2 or 0.9.4 you can gather the equivalent dataset with the scripts in CARLA_simulation_client.
The original CARLA dataset has been gathered with CARLA 0.8.2. You can find the client script for gathering the data in CARLA_simulation_client/gather_dataset.py. This script gathers 3D reconstructions of scenes (i.e. depth+images+ semantic segmentation) every 50th frame and images and bounding boxes of moving objects at every frame.
Gather a training set (path to folder in settings.py self.carla_path) with the script on CARLA_simulation_client/gather_dataset.py Town 1 and all of the test data is created on Town 2, which should be placed in self.carla_path_test.
You can change output_folder as necessary.
Next to combine the static objects in the .ply (viewable in Meshlab) files run carla_utils/combine_reconstructions.py.
Cityscapes
To create the Cityscapes dataset you need to have downloaded the cityscapes dataset, and you need to attain the semantic segmentation (originally from GRFP) and bounding boxes of each image (originally from PANNET). After this the scripts in colmap can be used to create 3d reconstructions of the dataset.
The adapted colmap (that use semantic segmentation as well as RGB) can be found here.
Due to Cityscapes licensing we cannot release our adapted Cityscapes dataset. We kindly ask you to reconstruct our results with the provided scripts.
For details please refer to the technical report Semantic and Articulated Pedestrian Sensing Onboard a Moving Vehicle available here.
Waymo dataset
Please check the documentation of the fork here to understand how to use the pipeline to get out the dataset needed for training/visualization the adapted Waymo repo. Also it currently depends on the segmentation from ResNet50dilated + PPM_deepsup
Use script <code>RL/visualization_scripts/show_real_reconstruction_small.py</code> for visualization purposes and an example on how to initialize correctly data data for setting up the environment. Due to Cityscapes licensing we cannot release our adapted Waymo dataset. We kindly ask you to reconstruct our dataset with the provided scripts.
Caching mechanism
The caching of episodes data happens in <code>environment_abstract.py</code>, inside <code>set_up_episode</code> function. This means that the first time around may be slow, but once the dataset is cached everything will run faster.
for each epoch E:
for each scenerio in dataset S:
episode = set_up_episode(S)
.....
Models
Semantic Pedestrian Locomotion Models
Models mentioned in the ACCV paper can be found in localData/Models/SemanticPedestrian.
There are two CARLA agents: a goal free generative/forecasting model and a goal-driven generative model.
On the Waymo dataset there is one agent: a goal free generative/forecasting model. Due to Waymo licencing we are not able to release the weights of the fully trained network publicly.
On the Cityscapes dataset there is one agent: goal-driven generative model.
Settings in RL/settings.py
Include the folder name of the weights you want to use in model. The model is searched for the path in settings.img_dir.
Remember to set the goal_dir=True in RL/setting.py for goal reaching agents and to goal_dir=False for goal free agents.
To just run the SPL pedestrian agent make sure the following settings are False:
self.learn_init = False # Do we need to learn initialization
self.learn_goal = False # Do we need to learn where to place the goal of the pedestrian at initialization
self.learn_time = False
...
self.useRealTimeEnv = False
self.useHeroCar = False
self.useRLToyCar = False
When running on carla set carla=True and waymo=False.
When running on waymo set carla=False and waymo=True.
When running on cityscapes set carla=False and waymo=False.
Adversarial Test Synthesizer Models
Models mentioned in the CoRL paper can be found in localData/Models/BehaviorVariedTestCaseGeneration.
To instead train the Adversarial Test Synthesizer make sure that the following settings are True:
self.learn_init =True # Do we need to learn initialization
self.learn_goal=False # Do we need to learn where to place the goal of the pedestrian at initialization
self.learn_time=False
...
self.useRealTimeEnv = True
self.useHeroCar = True
self.useRLToyCar = False