Awesome
DarkLighter: Light up the Darkness for UAV Tracking
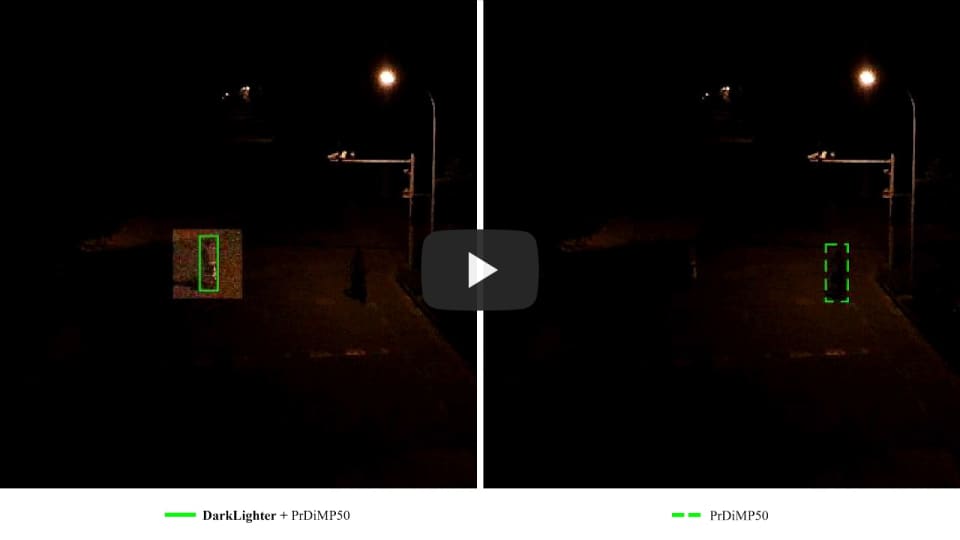
Code and demo videos of DarkLighter---a low-light enhancer towards facilitating UAV tracking in the dark.
Abstract
Recent years have witnessed the fast evolution and promising performance of the convolutional neural network (CNN)-based trackers, which aims at imitating biological visual systems. However, current CNN-based trackers can hardly generalize well to low-light scenes that are commonly lacked in the existing training set. In indistinguishable night scenarios frequently encountered in tracking-based applications on unmanned aerial vehicle (UAV), the robustness of the state-of-the-art trackers drops significantly. To facilitate aerial tracking in the dark through a general fashion, this work proposes an image enhancer namely DarkLighter, which dedicates to alleviate the impact of poor illumination conditions and noises iteratively. A lightweight network, i.e., LE-Net, is trained to efficiently estimate illumination layers and noise layers jointly. Experiments are conducted with several SOTA trackers on numerous UAV dark tracking scenarios. Exhaustive evaluations demonstrate the reliability and universality of DarkLighter, with high efficiency. Moreover, DarkLighter has further been implemented onboard a typical UAV system, real-world UAV tracking tests at night verify its practicability and dependability.
Demo video
Publication and citation
DarkLighter is proposed in our paper accepted by IROS 2021. Detailed explanation of our method can be found in the paper:
Junjie Ye, Changhong Fu, Guangze Zheng, Ziang Cao, and Bowen Li
DarkLighter: Light up the Darkness for UAV Tracking
In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021
Please cite the above publication if you find this work helpful. Bibtex entry:
@Inproceedings{Ye2021IROS,
title={{DarkLighter: Light up the Darkness for UAV Tracking}},
author={Ye, Junjie and Fu, Changhong and Zheng, Guangze and Cao, Ziang and Li, Bowen},
booktitle={Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year={2021},
pages={1-7}}
Contact
Junjie Ye
Email: ye.jun.jie@tongji.edu.cn
Changhong Fu
Email: changhongfu@tongji.edu.cn
Demonstration running instructions
Requirements
1.Python 3.7
2.Pytorch 1.0.0
3.opencv-python
4.torchvision
5.cuda 10.2
Download the package, extract it and follow two steps:
Put test images in data/test/, put training data in data/train/.
For testing, run:
python lowlight_test.pyFor training, run:
python lowlight_train.py
Acknowledgements
We sincerely thank the contribution of Chongyi Li, Chen Wei for their previous work Zero-DCE and RetinexNet.