Awesome
When and why vision-language models behave like bags-of-words, and what to do about it? (ICLR 2023 Oral)
Note This code will not work with the distributed/multi-gpu setting as it is currently implemented.
NegCLIP Implementation
NegCLIP introduces a few simple edits to the original OpenCLIP base. To ease the code-reading phase, I'll point out the main edits here; if you are familiar with how OpenCLIP works this should be easy to read/edit and modify.
Dataset
The dataset now requires loading hard captions (provided as a list) and hard image negatives. Hard captions and hard images are chosen at random at each epoch.
df = pd.read_csv(input_filename, sep=sep, converters={"neg_caption":ast.literal_eval, "neg_image":ast.literal_eval})
self.images = df[img_key].tolist()
self.captions = df[caption_key].tolist()
self.hard_captions = df[hard_captions_key].tolist()
self.hard_images = df["neg_image"].tolist()
self.transforms = transforms
[...]
# example of random selection of an hard caption
chosen_caption = random.choice(self.hard_captions[idx])
hard_captions = tokenize([str(chosen_caption)])[0]
Forward Pass
To reduce the number of edits we need to apply to the contrastive loss, we concatenate negative images and negative captions together. Once this is done we will let the model run the forward pass on this data.
images = torch.cat([images, hard_images]) # we concatenate images and hard images
texts = torch.cat([texts, texts_hard_images]) # we concatenate texts with the text of the hard images
texts = torch.cat([texts, hard_captions]) # we concatenate text with the hard captions
texts = torch.cat([texts, hard_captions_of_hard_images]) # we concatenate texts with the hard caption of the hard images
# Note. This operation is going to leave us with different in sizes. We will have 2x texts than images (because of the hard negatives).
# This will require us to fix how we compute the loss (see next section).
with autocast():
image_features, text_features, logit_scale = model(images, texts)
Loss
Finally, we have the loss. In the Forward Pass section we have built texts and images that have different lenghts.
Basically starting from a batchsize of 256, you get to a contrastive matrix of 512x1024 (for the image part we have
256 images + 256 hard images, for the text part we have 256 captions + 256 captions from the hard images + 256 hard captions + 256 hard captions from the hard images).
So we need to change the loss a bit to ignore computing the loss on the wrong items (see the paper).
total_loss = (
F.cross_entropy(logits_per_image, labels) +
F.cross_entropy(logits_per_text[:len(logits_per_image)], labels)
) / 2
Citation
If you use this code or data, please consider citing our paper:
@inproceedings{
yuksekgonul2023when,
title={When and why Vision-Language Models behave like Bags-of-Words, and what to do about it?},
author={Mert Yuksekgonul and Federico Bianchi and Pratyusha Kalluri and Dan Jurafsky and James Zou},
booktitle={International Conference on Learning Representations},
year={2023},
url={https://openreview.net/forum?id=KRLUvxh8uaX}
}
What follows from here is the original OpenCLIP readme.
Original OpenCLIP
Welcome to an open source implementation of OpenAI's CLIP (Contrastive Language-Image Pre-training).
The goal of this repository is to enable training models with contrastive image-text supervision, and to investigate their properties such as robustness to distribution shift. Our starting point is an implementation of CLIP that matches the accuracy of the original CLIP models when trained on the same dataset. Specifically, a ResNet-50 model trained with our codebase on OpenAI's 15 million image subset of YFCC achieves 32.7% top-1 accuracy on ImageNet. OpenAI's CLIP model reaches 31.3% when trained on the same subset of YFCC. For ease of experimentation, we also provide code for training on the 3 million images in the Conceptual Captions dataset, where a ResNet-50x4 trained with our codebase reaches 22.2% top-1 ImageNet accuracy.
We further this with a replication study on a dataset of comparable size to OpenAI's. Using LAION-400M, we train CLIP with a
- ViT-B/32 and achieve an accuracy of 62.9%, comparable to OpenAI's 63.2%, zero-shot top-1 on ImageNet1k
- ViT-B/16 and achieve an accuracy of 67.1%, comparable to OpenAI's 68.3% (as measured here, 68.6% in paper)
- ViT-B/16+ 240x240 (~50% more FLOPS than B/16 224x224) and achieve an accuracy of 69.2%
- ViT-L/14 and achieve an accuracy of 72.77%, vs OpenAI's 75.5% (as measured here, 75.3% in paper)
As we describe in more detail below, CLIP models in a medium accuracy regime already allow us to draw conclusions about the robustness of larger CLIP models since the models follow reliable scaling laws.
This codebase is work in progress, and we invite all to contribute in making it more acessible and useful. In the future, we plan to add support for TPU training and release larger models. We hope this codebase facilitates and promotes further research in contrastive image-text learning. Please submit an issue or send an email if you have any other requests or suggestions.
Note that portions of src/open_clip/ modelling and tokenizer code are adaptations of OpenAI's official repository.
Approach
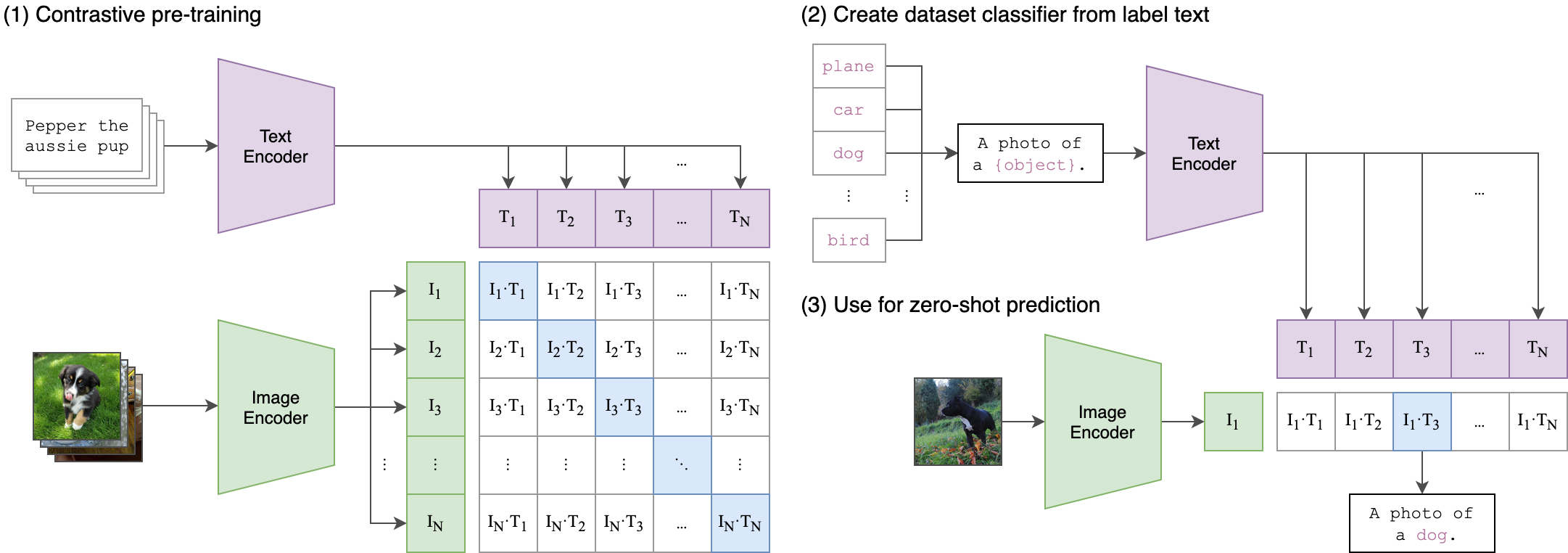 |
|---|
| Image Credit: https://github.com/openai/CLIP |
Usage
pip install open_clip_torch
import torch
from PIL import Image
import open_clip
model, _, preprocess = open_clip.create_model_and_transforms('ViT-B-32-quickgelu', pretrained='laion400m_e32')
image = preprocess(Image.open("CLIP.png")).unsqueeze(0)
text = open_clip.tokenize(["a diagram", "a dog", "a cat"])
with torch.no_grad():
image_features = model.encode_image(image)
text_features = model.encode_text(text)
image_features /= image_features.norm(dim=-1, keepdim=True)
text_features /= text_features.norm(dim=-1, keepdim=True)
text_probs = (100.0 * image_features @ text_features.T).softmax(dim=-1)
print("Label probs:", text_probs) # prints: [[1., 0., 0.]]
To compute billions of embeddings efficiently, you can use clip-retrieval which has openclip support.
Fine-tuning on classification tasks
This repository is focused on training CLIP models. To fine-tune a trained zero-shot model on a downstream classification task such as ImageNet, please see our other repository: WiSE-FT. The WiSE-FT repository contains code for our paper on Robust Fine-tuning of Zero-shot Models, in which we introduce a technique for fine-tuning zero-shot models while preserving robustness under distribution shift.
Data
Conceptual Captions
OpenCLIP reads a CSV file with two columns: a path to an image, and a text caption. The names of the columns are passed as an argument to main.py.
The script src/data/gather_cc.py will collect the Conceptual Captions images. First, download the Conceptual Captions URLs and then run the script from our repository:
python3 src/data/gather_cc.py path/to/Train_GCC-training.tsv path/to/Validation_GCC-1.1.0-Validation.tsv
Our training set contains 2.89M images, and our validation set contains 13K images.
YFCC and other datasets
In addition to specifying the training data via CSV files as mentioned above, our codebase also supports webdataset, which is recommended for larger scale datasets. The expected format is a series of .tar files. Each of these .tar files should contain two files for each training example, one for the image and one for the corresponding text. Both files should have the same name but different extensions. For instance, shard_001.tar could contain files such as abc.jpg and abc.txt. You can learn more about webdataset at https://github.com/webdataset/webdataset. We use .tar files with 1,000 data points each, which we create using tarp.
You can download the YFCC dataset from Multimedia Commons. Similar to OpenAI, we used a subset of YFCC to reach the aforementioned accuracy numbers. The indices of images in this subset are in OpenAI's CLIP repository.
Training CLIP
Setup Environment and Install dependencies
Conda
# Create a conda environment (heavily recommended)
conda create -n open_clip python=3.10
conda activate open_clip
Install conda PyTorch as per https://pytorch.org/get-started/locally/
Virtualenv
openclip also can be used with virtualenv with these lines:
python3 -m venv .env
source .env/bin/activate
pip install -U pip
make install
Install pip PyTorch as per https://pytorch.org/get-started/locally/
Test can be run with make install-dev then make test
Other dependencies
Install open_clip pacakge and remaining dependencies:
cd open_clip
python setup.py install
If you want to train models, you will also need to install the packages
from requirements-training.txt.
Sample single-process running code:
python -m training.main \
--save-frequency 1 \
--zeroshot-frequency 1 \
--report-to tensorboard \
--train-data="/path/to/train_data.csv" \
--val-data="/path/to/validation_data.csv" \
--csv-img-key filepath \
--csv-caption-key title \
--imagenet-val=/path/to/imagenet/root/val/ \
--warmup 10000 \
--batch-size=128 \
--lr=1e-3 \
--wd=0.1 \
--epochs=30 \
--workers=8 \
--model RN50
Note: imagenet-val is the path to the validation set of ImageNet for zero-shot evaluation, not the training set!
You can remove this argument if you do not want to perform zero-shot evaluation on ImageNet throughout training. Note that the val folder should contain subfolders. If it doest not, please use this script.
Multi-GPU and Beyond
This code has been battle tested up to 1024 A100s and offers a variety of solutions for distributed training. We include native support for SLURM clusters.
As the number of devices used to train increases, so does the space complexity of
the the logit matrix. Using a naïve all-gather scheme, space complexity will be
O(n^2). Instead, complexity may become effectively linear if the flags
--gather-with-grad and --local-loss are used. This alteration results in one-to-one
numerical results as the naïve method.
Single-Node
We make use of torchrun to launch distributed jobs. The following launches a
a job on a node of 4 GPUs:
cd open_clip/src
torchrun --nproc_per_node 4 -m training.main \
--train-data '/data/cc12m/cc12m-train-{0000..2175}.tar' \
--train-num-samples 10968539 \
--dataset-type webdataset \
--batch-size 320 \
--precision amp \
--workers 4 \
--imagenet-val /data/imagenet/validation/
Multi-Node
The same script above works, so long as users include information about the number of nodes and host node.
cd open_clip/src
torchrun --nproc_per_node=4 \
--rdzv_endpoint=$HOSTE_NODE_ADDR \
-m training.main \
--train-data '/data/cc12m/cc12m-train-{0000..2175}.tar' \
--train-num-samples 10968539 \
--dataset-type webdataset \
--batch-size 320 \
--precision amp \
--workers 4 \
--imagenet-val /data/imagenet/validation/
SLURM
This is likely the easiest solution to utilize. The following script was used to train our largest models:
#!/bin/bash -x
#SBATCH --nodes=32
#SBATCH --gres=gpu:4
#SBATCH --ntasks-per-node=4
#SBATCH --cpus-per-task=6
#SBATCH --wait-all-nodes=1
#SBATCH --job-name=open_clip
#SBATCH --account=ACCOUNT_NAME
#SBATCH --partition PARTITION_NAME
eval "$(/path/to/conda/bin/conda shell.bash hook)" # init conda
conda activate open_clip
export CUDA_VISIBLE_DEVICES=0,1,2,3
export MASTER_PORT=12802
master_addr=$(scontrol show hostnames "$SLURM_JOB_NODELIST" | head -n 1)
export MASTER_ADDR=$master_addr
cd /shared/open_clip
export PYTHONPATH="$PYTHONPATH:$PWD/src"
srun --cpu_bind=v --accel-bind=gn python -u src/training/main.py \
--save-frequency 1 \
--report-to tensorboard \
--train-data="/data/LAION-400M/{00000..41455}.tar" \
--warmup 2000 \
--batch-size=256 \
--epochs=32 \
--workers=8 \
--model ViT-B-32 \
--name "ViT-B-32-Vanilla" \
--seed 0 \
--local-loss \
--gather-with-grad
Resuming from a checkpoint:
python -m training.main \
--train-data="/path/to/train_data.csv" \
--val-data="/path/to/validation_data.csv" \
--resume /path/to/checkpoints/epoch_K.pt
Loss Curves
When run on a machine with 8 GPUs the command should produce the following training curve for Conceptual Captions:
More detailed curves for Conceptual Captions are given at /docs/clip_conceptual_captions.md.
When training a RN50 on YFCC the same hyperparameters as above are used, with the exception of lr=5e-4 and epochs=32.
Note that to use another model, like ViT-B/32 or RN50x4 or RN50x16 or ViT-B/16, specify with --model RN50x4.
Launch tensorboard:
tensorboard --logdir=logs/tensorboard/ --port=7777
Evaluation / Zero-Shot
Evaluating local checkpoint:
python -m training.main \
--val-data="/path/to/validation_data.csv" \
--model RN101 \
--pretrained /path/to/checkpoints/epoch_K.pt
Evaluating hosted pretrained checkpoint on ImageNet zero-shot prediction:
python -m training.main \
--imagenet-val /path/to/imagenet/validation \
--model ViT-B-32-quickgelu \
--pretrained laion400m_e32
Pretrained model details
LAION-400M - https://laion.ai/laion-400-open-dataset
We are working on reproducing OpenAI's ViT results with the comparably sized (and open) LAION-400M dataset. Trained weights may be found in release v0.2.
The LAION400M weights have been trained on the JUWELS supercomputer (see acknowledgements section below).
ViT-B/32 224x224
We replicate OpenAI's results on ViT-B/32, reaching a top-1 ImageNet-1k zero-shot accuracy of 62.96%.
<img src="https://raw.githubusercontent.com/mlfoundations/open_clip/main/docs/laion_clip_zeroshot.png" width="700">Zero-shot comparison (courtesy of Andreas Fürst) <img src="https://raw.githubusercontent.com/mlfoundations/open_clip/main/docs/laion_openai_compare_b32.jpg" width="700">
ViT-B/32 was trained with 128 A100 (40 GB) GPUs for ~36 hours, 4600 GPU-hours. The per-GPU batch size was 256 for a global batch size of 32768. 256 is much lower than it could have been (~320-384) due to being sized initially before moving to 'local' contrastive loss.
ViT-B/16 224x224
The B/16 LAION400M training reached a top-1 ImageNet-1k zero-shot validation score of 67.07.
<img src="https://raw.githubusercontent.com/mlfoundations/open_clip/main/docs/laion_clip_zeroshot_b16.png" width="700">This was the first major train session using the updated webdataset 0.2.x code. A bug was found that prevented shards from being shuffled properly between nodes/workers each epoch. This was fixed part way through training (epoch 26) but likely had an impact.
ViT-B/16 was trained with 176 A100 (40 GB) GPUS for ~61 hours, 10700 GPU-hours. Batch size per GPU was 192 for a global batch size of 33792.
ViT-B/16+ 240x240
The B/16+ 240x240 LAION400M training reached a top-1 ImageNet-1k zero-shot validation score of 69.21.
This model is the same depth as the B/16, but increases the
- vision width from 768 -> 896
- text width from 512 -> 640
- the resolution 224x224 -> 240x240 (196 -> 225 tokens)
Unlike the B/16 run above, this model was a clean run with no dataset shuffling issues.
ViT-B/16+ was trained with 224 A100 (40 GB) GPUS for ~61 hours, 13620 GPU-hours. Batch size per GPU was 160 for a global batch size of 35840.
ViT-L/14 224x224
The L/14 LAION-400M training reached a top-1 ImageNet-1k zero-shot validation score of 72.77.
<img src="https://raw.githubusercontent.com/mlfoundations/open_clip/main/docs/laion_clip_zeroshot_l14.png" width="700">ViT-L/14 was trained with 400 A100 (40 GB) GPUS for ~127 hours, 50800 GPU-hours. Batch size per GPU was 96 for a global batch size of 38400. Grad checkpointing was enabled.
LAION-2B (en) - https://laion.ai/laion-5b-a-new-era-of-open-large-scale-multi-modal-datasets/
A ~2B sample subset of LAION-5B with english captions (https://huggingface.co/datasets/laion/laion2B-en)
ViT-B/32 224x224
A ViT-B/32 trained on LAION-2B, reaching a top-1 ImageNet-1k zero-shot accuracy of 65.62%.
<img src="https://raw.githubusercontent.com/mlfoundations/open_clip/main/docs/laion2b_clip_zeroshot_b32.png" width="700">ViT-B/32 was trained with 112 A100 (40 GB) GPUs. The per-GPU batch size was 416 for a global batch size of 46592. Compute generously provided by stability.ai.
YFCC-15M
Below are checkpoints of models trained on YFCC-15M, along with their zero-shot top-1 accuracies on ImageNet and ImageNetV2. These models were trained using 8 GPUs and the same hyperparameters described in the "Sample running code" section, with the exception of lr=5e-4 and epochs=32.
- ResNet-50 (32.7% / 27.9%)
- ResNet-101 (34.8% / 30.0%)
CC12M - https://github.com/google-research-datasets/conceptual-12m
- ResNet-50 (36.45%)
Pretrained Model Interface
We offer a simple model interface to instantiate both pre-trained and untrained models.
NOTE: Many existing checkpoints use the QuickGELU activation from the original OpenAI models. This activation is actually less efficient that native torch.nn.GELU in recent versions of PyTorch. The model defaults are now nn.GELU, so one should use model definitions with -quickgelu postfix for the OpenCLIP pretrained weights. All OpenAI pretrained weights will always default to QuickGELU. One can also use the non -quickgelu model definitions with pretrained weights using QuickGELU but there will be an accuracy drop, for fine-tune that will likely vanish for longer runs.
Future trained models will use nn.GELU.
>>> import open_clip
>>> open_clip.list_pretrained()
[('RN50', 'openai'),
('RN50', 'yfcc15m'),
('RN50', 'cc12m'),
('RN50-quickgelu', 'openai'),
('RN50-quickgelu', 'yfcc15m'),
('RN50-quickgelu', 'cc12m'),
('RN101', 'openai'),
('RN101', 'yfcc15m'),
('RN101-quickgelu', 'openai'),
('RN101-quickgelu', 'yfcc15m'),
('RN50x4', 'openai'),
('RN50x16', 'openai'),
('RN50x64', 'openai'),
('ViT-B-32', 'openai'),
('ViT-B-32', 'laion2b_e16'),
('ViT-B-32', 'laion400m_e31'),
('ViT-B-32', 'laion400m_e32'),
('ViT-B-32-quickgelu', 'openai'),
('ViT-B-32-quickgelu', 'laion400m_e31'),
('ViT-B-32-quickgelu', 'laion400m_e32'),
('ViT-B-16', 'openai'),
('ViT-B-16', 'laion400m_e31'),
('ViT-B-16', 'laion400m_e32'),
('ViT-B-16-plus-240', 'laion400m_e31'),
('ViT-B-16-plus-240', 'laion400m_e32'),
('ViT-L-14', 'openai'),
('ViT-L-14-336', 'openai')]
>>> model, train_transform, eval_transform = open_clip.create_model_and_transforms('ViT-B-32', pretrained='laion2b_e16')
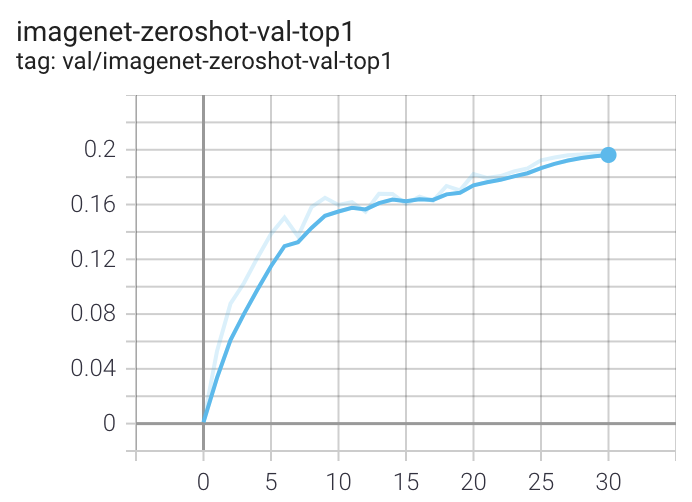
Scaling trends
The plot below shows how zero-shot performance of CLIP models varies as we scale the number of samples used for training. Zero-shot performance increases steadily for both ImageNet and ImageNetV2, and is far from saturated at ~15M samples.
<img src="https://raw.githubusercontent.com/mlfoundations/open_clip/main/docs/scaling.png" width="700">Why are low-accuracy CLIP models interesting?
TL;DR: CLIP models have high effective robustness, even at small scales.
CLIP models are particularly intriguing because they are more robust to natural distribution shifts (see Section 3.3 in the CLIP paper). This phenomena is illustrated by the figure below, with ImageNet accuracy on the x-axis and ImageNetV2 (a reproduction of the ImageNet validation set with distribution shift) accuracy on the y-axis. Standard training denotes training on the ImageNet train set and the CLIP zero-shot models are shown as stars.
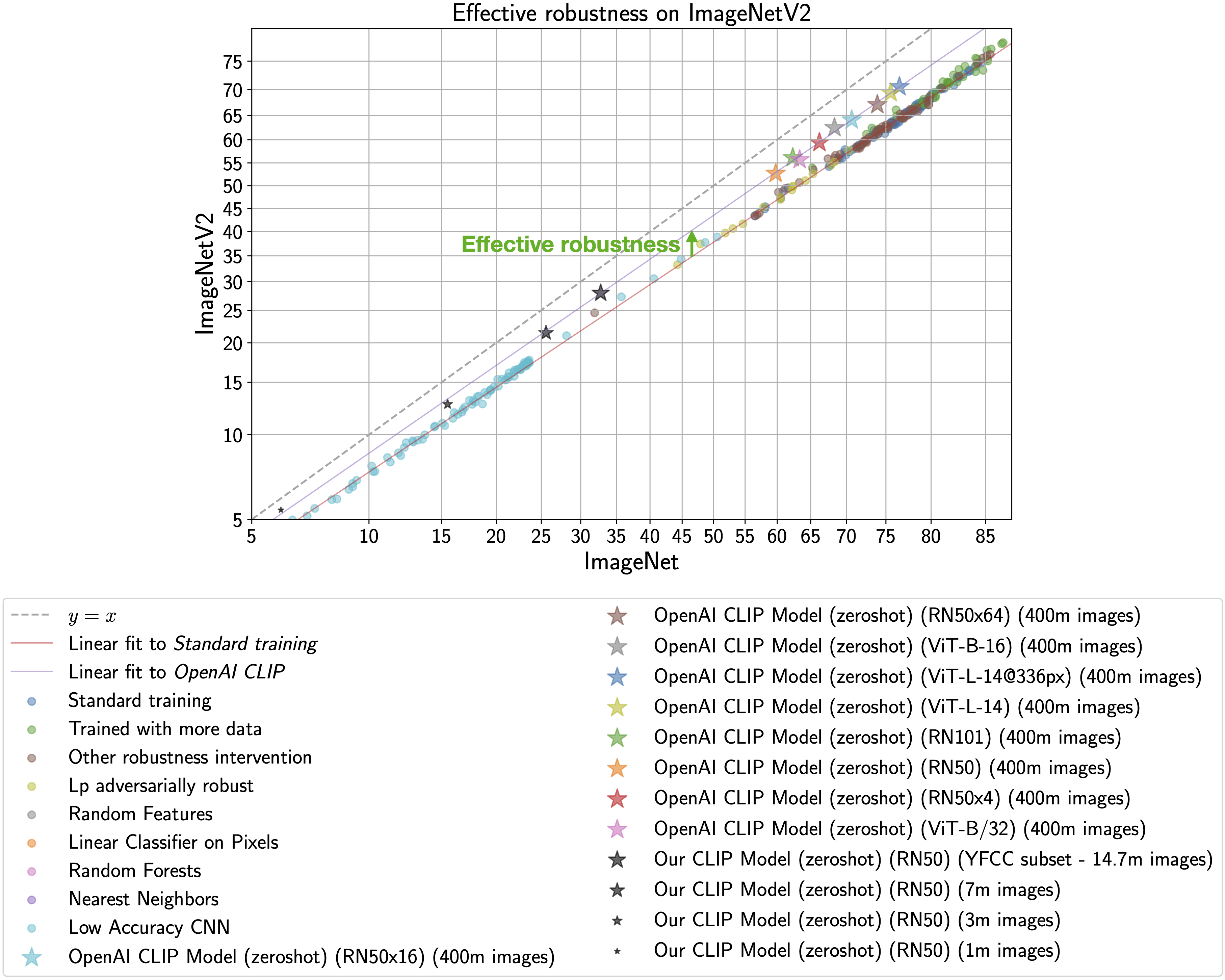
As observed by Taori et al., 2020 and Miller et al., 2021, the in-distribution and out-of-distribution accuracies of models trained on ImageNet follow a predictable linear trend (the red line in the above plot). Effective robustness quantifies robustness as accuracy beyond this baseline, i.e., how far a model lies above the red line. Ideally a model would not suffer from distribution shift and fall on the y = x line (trained human labelers are within a percentage point of the y = x line).
Even though the CLIP models trained with this codebase achieve much lower accuracy than those trained by OpenAI, our models still lie on the same trend of improved effective robustness (the purple line). Therefore, we can study what makes CLIP robust without requiring industrial-scale compute.
For more information on effective robustness, please see:
To know more about the factors that contribute to CLIP's robustness refer to Fang et al., 2022.
Acknowledgments
We gratefully acknowledge the Gauss Centre for Supercomputing e.V. (www.gauss-centre.eu) for funding this part of work by providing computing time through the John von Neumann Institute for Computing (NIC) on the GCS Supercomputer JUWELS Booster at Jülich Supercomputing Centre (JSC).
The Team
Current development of this repository is led by Ross Wightman, Cade Gordon, and Vaishaal Shankar.
The original version of this repository is from a group of researchers at UW, Google, Stanford, Amazon, Columbia, and Berkeley.
Gabriel Ilharco*, Mitchell Wortsman*, Nicholas Carlini, Rohan Taori, Achal Dave, Vaishaal Shankar, John Miller, Hongseok Namkoong, Hannaneh Hajishirzi, Ali Farhadi, Ludwig Schmidt
Special thanks to Jong Wook Kim and Alec Radford for help with reproducing CLIP!
Citing
If you found this repository useful, please consider citing:
@software{ilharco_gabriel_2021_5143773,
author = {Ilharco, Gabriel and
Wortsman, Mitchell and
Wightman, Ross and
Gordon, Cade and
Carlini, Nicholas and
Taori, Rohan and
Dave, Achal and
Shankar, Vaishaal and
Namkoong, Hongseok and
Miller, John and
Hajishirzi, Hannaneh and
Farhadi, Ali and
Schmidt, Ludwig},
title = {OpenCLIP},
month = jul,
year = 2021,
note = {If you use this software, please cite it as below.},
publisher = {Zenodo},
version = {0.1},
doi = {10.5281/zenodo.5143773},
url = {https://doi.org/10.5281/zenodo.5143773}
}
@inproceedings{Radford2021LearningTV,
title={Learning Transferable Visual Models From Natural Language Supervision},
author={Alec Radford and Jong Wook Kim and Chris Hallacy and A. Ramesh and Gabriel Goh and Sandhini Agarwal and Girish Sastry and Amanda Askell and Pamela Mishkin and Jack Clark and Gretchen Krueger and Ilya Sutskever},
booktitle={ICML},
year={2021}
}
![]()