Awesome
MechanismGeometries
![]()

This package implements several methods of generating or loading geometries associated with a RigidBodyDynamics.jl Mechanism in Julia. It is currently used by MeshCatMechanisms.jl but can also be used independently.
Interface
This package exports one primary method:
visual_elements(mechanism::Mechanism, source::AbstractGeometrySource)
visual_elements returns a vector of VisualElement structs, each of which contains:
frame: ACartesianFrame3Dindicating where the geometry is attached in the mechanismgeometry: One of the GeometryBasics.jl typescolor: an RGBA color from ColorTypes.jltransform: aTransformationfrom CoordinateTransformations.jl indicating the pose of the geometry w.r.t its attached frame.
Currently implemented sources
These demonstrations use the Boston Dynamics Atlas robot from AtlasRobot.jl.
using AtlasRobot
using MechanismGeometries
mechanism = AtlasRobot.mechanism()
Skeleton
Skeleton <: AbstractGeometrySource
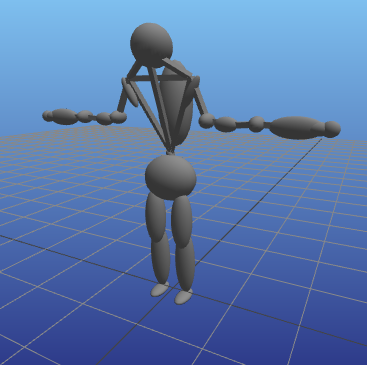
The Skeleton type uses only the joints and bodies in the mechanism itself to construct a visual representation of the robot's links. The sticks connect joints in the mechanism and the ellipsoids represent the mass and moment of inertia of each body:
visual_elements(mechanism, Skeleton())
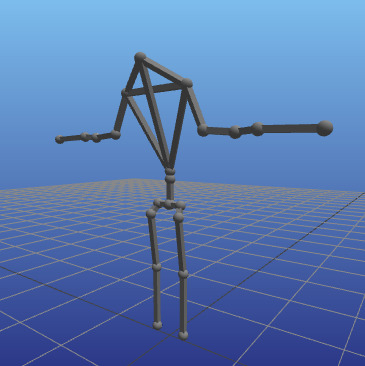
The moment of inertia ellipsoids can also be turned off, leaving just the joint connections:
visual_elements(mechanism, Skeleton(inertias=false))
URDF Visuals
URDFVisuals <: AbstractGeometrySource
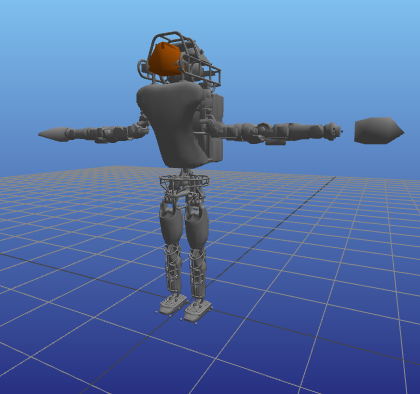
The URDFVisuals type loads the visual elements from a given URDF file (passed as either a filename or a parsed XMLDocument from LightXML.jl). One particularly useful argument is package_path, which accepts a list of strings to use as potential directories to search when encountering mesh files using the ROS package:// syntax.
visual_elements(mechanism,
URDFVisuals(AtlasRobot.urdfpath(),
package_path=[AtlasRobot.packagepath()]))
URDF Extensions
The following extensions to the URDF spec are parsed by MechanismGeometries.jl:
<plane normal="0 0 1"/>: Represents an infinite plane perpendicular to thenormalgiven as an x y z unit vector. Returns a MechanismGeometries.HyperPlane