Awesome
What You See Is What You Get:<br/>Exploiting Visibility for 3D Object Detection
By Peiyun Hu, Jason Ziglar, David Held, and Deva Ramanan
Citing us
You can find our paper on CVF Open Access. If you find our work useful, please consider citing:
@inproceedings{hu20wysiwyg,
title={What You See Is What You Get: Exploiting Visibility for 3d Object Detection},
author={Hu, Peiyun and Ziglar, Jason and Held, David and Ramanan, Deva},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
pages={11001--11009},
year={2020}
}
Setup
The code is developed based on SECOND, a well-known deep network based 3D object detector. Please refer to this README and NUSCENES-GUIDE on how to set up a working environment for the SECOND detector.
Perhaps most importantly, you have to install spconv.
Pre-trained models
Download the pre-trained weights of the proposed model (early fusion) from Google Drive.
The model configuration is located at second/configs/nuscenes/all.pp.mhead.vpn.config.
Training
Run the following command to start training our model.
python script.py train_nuscenes --base_cfg="all.pp.mhead.vpn.config" --sample_factor=1 --epochs=20 --eval_epoch=2 --sweep_db=True --label=vp_pp_oa_ta_learn --resume=True
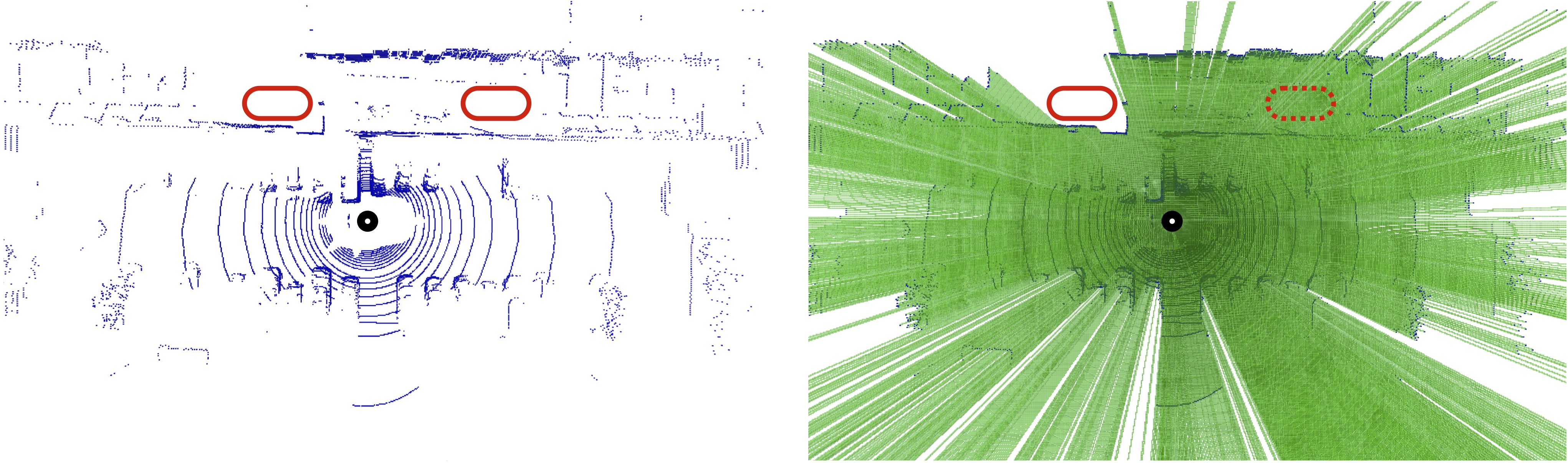
Raycasting
You can find the code for raycasting under second/utils/mapping. The default setting for raycasting drilling.
We call raycasting functions in second/data/preprocess.py. If you are interested in integrating visibility into your own work, you can use it as an example of how to extract a visibility volume out of a LiDAR point cloud.
You will need to compile the code using CMake.