Awesome
Plane Seg 
Plane Seg is a library for fitting planes to LIDAR, depth camera data or elevation maps. It uses robust estimation to fit planes by clustering planar points with similar normals.
We assume the ROS build system (e.g. Melodic). The core library (plane-seg) is only dependent on PCL. The ROS application (plane-seg-ros) can process PointCloud2 and GridMap data types.
The edge detection package depends on Rviz Visual Tools and on the Locomotion Viewer library.
Using It
Run-Time Application: A sample application (for ANYmal) can be run and visualized (in Rviz) as follows:
roslaunch plane_seg_ros anymal.launch
roslaunch plane_seg_ros view_plane_seg.launch
Test program: reads example point clouds (PCDs), processes them and executes the fitting algorithm:
roslaunch plane_seg_ros test.launch
roslaunch plane_seg_ros view_plane_seg.launch
Run edge detection:
rosrun edge_detection_ros edge_detection_ros
Input
Input should be a point cloud or elevation map in the robot's odometry frame as well as the pose of the robot in the odometry frame. The elevation map is assumed to be at a 1-2 Hz.
Output
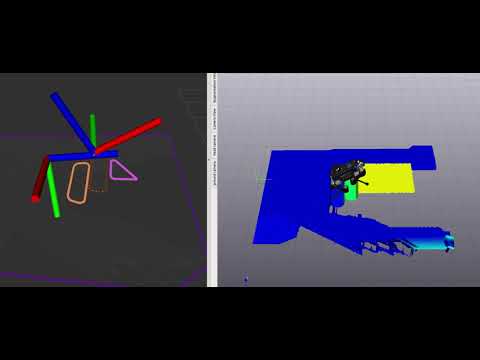
- A series of planar convex hulls published to ROS at 1-2 Hz
- Nov 2019: Existing limitation is that the code searches for plane regions (which works fine), but that these regions are then assumed to be convex. However, they could be concave. We need to instead break concave regions into convex ones - a basic task.
- A series of line segments (edges) of published to ROS at 1-2 Hz. The minimum lenght of the edges can be adjusted, as much as the minimum height required to detect a new step.
Performance
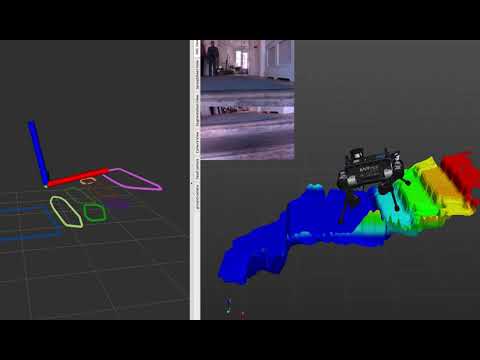
- The ANYmal RGB-D (RealSense D435) elevation map is 2cm resolution with 18000 points. It takes 0.3 seconds to process.
- The DRC LIDAR terrain scan below is very dense with 76000 points. It takes 2.5 seconds to process.
Authors
Originally Developed as part of the DARPA Robotics Challenge project at MIT. Subsequent improvements and conversion to ROS was carried out at the DRS Group in Oxford during the MEMMO EU H2020 Project.
Maintainers: DRS Group at Oxford Robotics Institute<br /> Original Author: Matt Antone (then at MIT)
The source code is released under a BSD 3-Clause license.
Citing this work
If you use this work in an academic context, please use the following:
-
M. Fallon, M. Antone, "Plane Seg – Robustly and Efficiently Extracting Contact Regions from Depth Data".
@misc{Fallon2019PlaneSeg, author = {Fallon, Maurice and Antone, Matt}, url = {https://github.com/ori-drs/plane_seg}, title = {{Plane Seg – Robustly and Efficiently Extracting Contact Regions from Depth Data}}, year = {2019}, }
Other Images
Segmenting the DARPA Robotics Challenge terrain:

Actual DRC Finals terrain (not quite the same scene):

Video of ANYmal climbing a simulated staircase in Gazebo: