Awesome
Aggregate View Object Detection

This repository contains the public release of the Python implementation of our Aggregate View Object Detection (AVOD) network for 3D object detection.
Joint 3D Proposal Generation and Object Detection from View Aggregation
Jason Ku, Melissa Mozifian, Jungwook Lee, Ali Harakeh, Steven L. Waslander
If you use this code, please cite our paper:
@article{ku2018joint,
title={Joint 3D Proposal Generation and Object Detection from View Aggregation},
author={Ku, Jason and Mozifian, Melissa and Lee, Jungwook and Harakeh, Ali and Waslander, Steven},
journal={IROS},
year={2018}
}
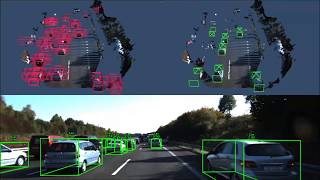
Videos
These videos show detections on several KITTI sequences and our own data in snowy and night driving conditions (with no additional training data).
AVOD Detections
AVOD-FPN Detections

KITTI Object Detection Results (3D and BEV)
| AP-3D | AP-BEV | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Method | Runtime | Easy | Moderate | Hard | Easy | Moderate | Hard | ||
| Car | |||||||||
| MV3D | 0.36 | 71.09 | 62.35 | 55.12 | 86.02 | 76.90 | 68.49 | ||
| VoxelNet | 0.23 | 77.47 | 65.11 | 57.73 | 89.35 | 79.26 | 77.39 | ||
| F-PointNet | 0.17 | 81.20 | 70.39 | 62.19 | 88.70 | 84.00 | 75.33 | ||
| AVOD | 0.08 | 73.59 | 65.78 | 58.38 | 86.80 | 85.44 | 77.73 | ||
| AVOD-FPN | 0.10 | 81.94 | 71.88 | 66.38 | 88.53 | 83.79 | 77.90 | ||
| Pedestrian | |||||||||
| VoxelNet | 0.23 | 39.48 | 33.69 | 31.51 | 46.13 | 40.74 | 38.11 | ||
| F-PointNet | 0.17 | 51.21 | 44.89 | 40.23 | 58.09 | 50.22 | 47.20 | ||
| AVOD | 0.08 | 38.28 | 31.51 | 26.98 | 42.52 | 35.24 | 33.97 | ||
| AVOD-FPN | 0.10 | 50.80 | 42.81 | 40.88 | 58.75 | 51.05 | 47.54 | ||
| Cyclist | |||||||||
| VoxelNet | 0.23 | 61.22 | 48.36 | 44.37 | 66.70 | 54.76 | 50.55 | ||
| F-PointNet | 0.17 | 71.96 | 56.77 | 50.39 | 75.38 | 61.96 | 54.68 | ||
| AVOD | 0.08 | 60.11 | 44.90 | 38.80 | 63.66 | 47.74 | 46.55 | ||
| AVOD-FPN | 0.10 | 64.00 | 52.18 | 46.61 | 68.09 | 57.48 | 50.77 |
Table: Comparison of results with other published methods on the KITTI 3D Object and BEV benchmarks (accessed Apr 11, 2018).
Additional Links
AVOD-SSD
There is a single stage version of AVOD available here
Average Heading Similarity (AHS) Native Evaluation
See here for more information on the modified KITTI native evaluation script.
Getting Started
Implemented and tested on Ubuntu 16.04 with Python 3.5 and Tensorflow 1.3.0.
- Clone this repo
git clone git@github.com:kujason/avod.git --recurse-submodules
If you forget to clone the wavedata submodule:
git submodule update --init --recursive
- Install Python dependencies
cd avod
pip3 install -r requirements.txt
pip3 install tensorflow-gpu==1.3.0
- Add
avod (top level)andwavedatato your PYTHONPATH
# For virtualenvwrapper users
add2virtualenv .
add2virtualenv wavedata
# For nonvirtualenv users
export PYTHONPATH=$PYTHONPATH:'/path/to/avod'
export PYTHONPATH=$PYTHONPATH:'/path/to/avod/wavedata'
- Compile integral image library in wavedata
sh scripts/install/build_integral_image_lib.bash
- Avod uses Protobufs to configure model and training parameters. Before the framework can be used, the protos must be compiled (from top level avod folder):
sh avod/protos/run_protoc.sh
Alternatively, you can run the protoc command directly:
protoc avod/protos/*.proto --python_out=.
Training
Dataset
To train on the Kitti Object Detection Dataset:
- Download the data and place it in your home folder at
~/Kitti/object - Go here and download the
train.txt,val.txtandtrainval.txtsplits into~/Kitti/object. Also download theplanesfolder into~/Kitti/object/training
The folder should look something like the following:
Kitti
object
testing
training
calib
image_2
label_2
planes
velodyne
train.txt
val.txt
Mini-batch Generation
The training data needs to be pre-processed to generate mini-batches for the RPN. To configure the mini-batches, you can modify avod/configs/mb_preprocessing/rpn_[class].config. You also need to select the class you want to train on. Inside the scripts/preprocessing/gen_mini_batches.py select the classes to process. By default it processes the Car and People classes, where the flag process_[class] is set to True. The People class includes both Pedestrian and Cyclists. You can also generate mini-batches for a single class such as Pedestrian only.
Note: This script does parallel processing with num_[class]_children processes for faster processing. This can also be disabled inside the script by setting in_parallel to False.
cd avod
python scripts/preprocessing/gen_mini_batches.py
Once this script is done, you should now have the following folders inside avod/data:
data
label_clusters
mini_batches
Training Configuration
There are sample configuration files for training inside avod/configs. You can train on the example configs, or modify an existing configuration. To train a new configuration, copy a config, e.g. pyramid_cars_with_aug_example.config, rename this file to a unique experiment name and make sure the file name matches the checkpoint_name: 'pyramid_cars_with_aug_example' entry inside your config.
Run Trainer
To start training, run the following:
python avod/experiments/run_training.py --pipeline_config=avod/configs/pyramid_cars_with_aug_example.config
(Optional) Training defaults to using GPU device 1, and the train split. You can specify using the GPU device and data split as follows:
python avod/experiments/run_training.py --pipeline_config=avod/configs/pyramid_cars_with_aug_example.config --device='0' --data_split='train'
Depending on your setup, training should take approximately 16 hours with a Titan Xp, and 20 hours with a GTX 1080. If the process was interrupted, training (or evaluation) will continue from the last saved checkpoint if it exists.
Run Evaluator
To start evaluation, run the following:
python avod/experiments/run_evaluation.py --pipeline_config=avod/configs/pyramid_cars_with_aug_example.config
(Optional) With additional options:
python avod/experiments/run_evaluation.py --pipeline_config=avod/configs/pyramid_cars_with_aug_example.config --device='0' --data_split='val'
The evaluator has two main modes, you can either evaluate a single checkpoint, a list of indices of checkpoints, or repeatedly. The evaluator is designed to be run in parallel with the trainer on the same GPU, to repeatedly evaluate checkpoints. This can be configured inside the same config file (look for eval_config entry).
To view the TensorBoard summaries:
cd avod/data/outputs/pyramid_cars_with_aug_example
tensorboard --logdir logs
Note: In addition to evaluating the loss, calculating accuracies, etc, the evaluator also runs the KITTI native evaluation code on each checkpoint. Predictions are converted to KITTI format and the AP is calculated for every checkpoint. The results are saved inside scripts/offline_eval/results/pyramid_cars_with_aug_example_results_0.1.txt where 0.1 is the score threshold. IoUs are set to (0.7, 0.5, 0.5)
Run Inference
To run inference on the val split, run the following script:
python avod/experiments/run_inference.py --checkpoint_name='pyramid_cars_with_aug_example' --data_split='val' --ckpt_indices=120 --device='1'
The ckpt_indices here indicates the indices of the checkpoint in the list. If the checkpoint_interval inside your config is 1000, to evaluate checkpoints 116000 and 120000, the indices should be --ckpt_indices=116 120. You can also just set this to -1 to evaluate the last checkpoint.
Viewing Results
All results should be saved in avod/data/outputs. Here you should see proposals_and_scores and final_predictions_and_scores results. To visualize these results, you can run demos/show_predictions_2d.py. The script needs to be configured to your specific experiments. The scripts/offline_eval/plot_ap.py will plot the AP vs. step, and print the 5 highest performing checkpoints for each evaluation metric at the moderate difficulty.
LICENSE
Copyright (c) 2018 Jason Ku, Melissa Mozifian, Ali Harakeh, Steven L. Waslander
Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.