Awesome
DGS-SLAM: Gaussian Splatting SLAM in Dynamic Environments
![]()
Abstract
Dynamic Gaussian Splatting SLAM (DGS-SLAM) is the first dynamic SLAM framework built on the foundation of Gaussian Splatting. While recent advancements in dense SLAM have leveraged Gaussian Splatting to enhance scene representation, most approaches assume a static environment, making them vulnerable to photometric and geometric inconsistencies caused by dynamic objects.
DGS-SLAM addresses these challenges by integrating a robust filtering process into the Gaussian Splatting pipeline. This framework effectively handles dynamic objects throughout the entire SLAM pipeline, including Gaussian insertion and keyframe selection, to achieve robust performance in dynamic environments.
<!-- ## 🔥 Key Features - **Dynamic Object Filtering** Introduces a robust mask generation method to enforce photometric consistency across keyframes, reducing segmentation noise and artifacts such as shadows. - **Loop-Aware Optimization** Proposes a loop-aware window selection mechanism that detects and optimizes loops using unique keyframe IDs of 3D Gaussians. - **State-of-the-Art Results** Achieves superior performance in **camera tracking** and **novel view synthesis** on dynamic SLAM benchmarks. [➡️ Explore the Code](https://github.com/kmk97/DGS-SLAM) -->📜 Pipeline Overview
The DGS-SLAM pipeline incorporates Gaussian Splatting, robust filtering, keyframe management, and loop-aware optimization. Below is a visual representation of the process:

🎥 Results
Check out the example videos below:
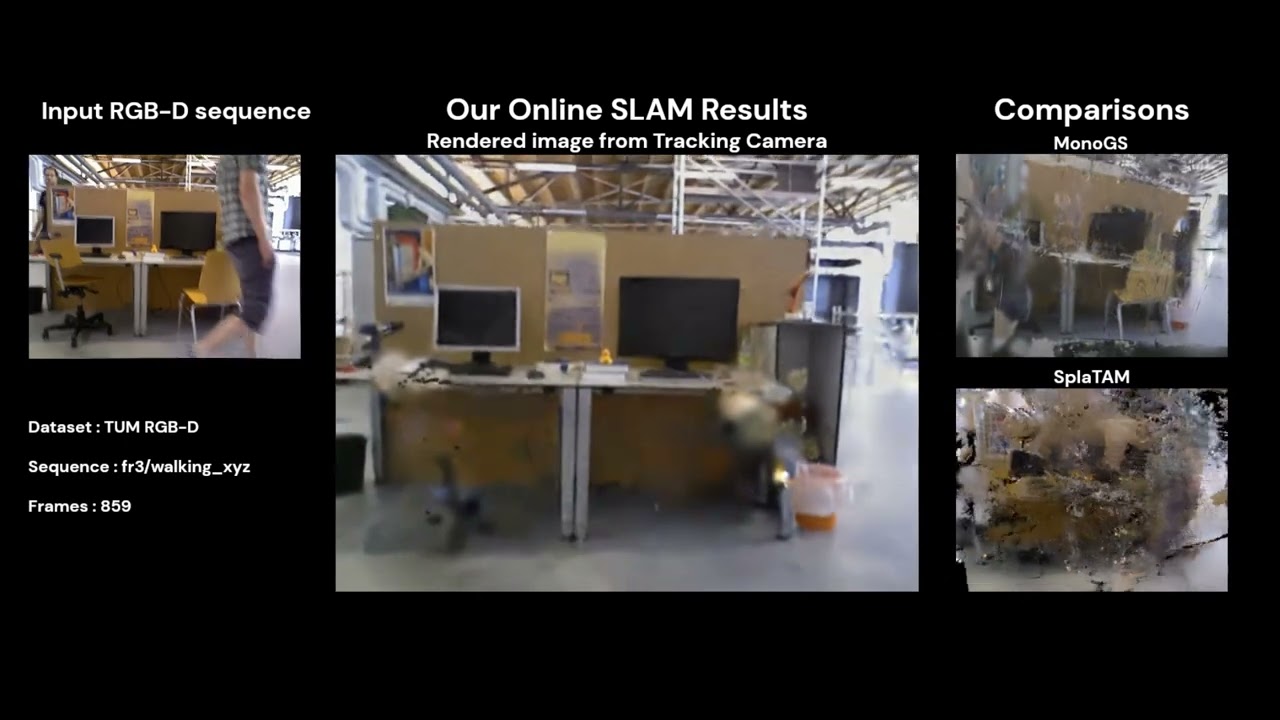
(Click the image to watch the video on YouTube)
<!-- ## 🚀 Getting Started ### Installation ```bash # Clone the repository git clone https://github.com/kmk97/DGS-SLAM.git cd DGS-SLAM # Install dependencies pip install -r requirements.txt -->