Awesome
mc_naoqi
![]()
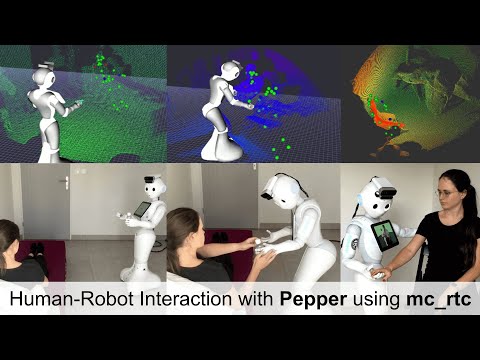
Interface to handle communication between mc_rtc and SoftBank humanoid robots running NAOqi OS

Video presentation
Author, Contact, BibTeX
Anastasia Bolotnikova (a.bolotnikova[at]softbankrobotics.com)
@unpublished{bolotnikova2021sii,
title = {Task-Space Control Interface for SoftBank Humanoid Robots and its Human-Robot Interaction Applications},
author = {Anastasia Bolotnikova and Pierre Gergondet and Arnaud Tanguy and S{\'e}bastien Courtois and Abderrahmane Kheddar},
booktitle = {IEEE/SICE International Symposium on System Integration (SII 2021)},
pdf = {https://hal.archives-ouvertes.fr/hal-02919367v3/document},
url = {https://hal.archives-ouvertes.fr/hal-02919367},
month = {January},
year = {2021}
}
Installation
On the control computer
The communication with naoqi OS is based on libqi.
Dependencies
Ubuntu Bionic (18.04)
On ubuntu bionic, libqi may be installed from ROS packages naoqi_libqi
sudo apt-get install ros-melodic-naoqi-libqi
Ubuntu Focal (20.04)
Unfortunately, libqi is not officially supported on libqi, aue to changes in Boost 1.70 networking API, the official repository does not compile. We provide a patched version maintained at https://github.com/arntanguy/libqi
git clone --recursive https://github.com/arntanguy/libqi.git
cd libqi
mkdir build && cd build
cmake -DQI_WITH_TESTS=OFF ..
make -j8
sudo make install
Installing mc_naoqi
After installing the above dependencies, compile and install mc_naoqi.
git clone --recursive https://github.com/jrl-umi3218/mc_naoqi.git
cd mc_naoqi
mkdir build && cd build
cmake -DCMAKE_BUILD_TYPE=RelWithDebInfo ..
make -j8
sudo make install
On the robot
Communication with the robot sensors and actuators is managed using the embedded DCM module on the robot. To access its features, mc_naoqi_dcm needs to be installed and run on the robot.
Usage
To use the interface and connect to a real robot run
mc_naoqi -h <robot_hostname> -p <robot_port> -f <mc_rtc_configuration_file.conf>
Where <mc_rtc_configuration_file.yaml> is based on <INSTALL_PREFIX>/etc/mc_naoqi/<robot>.yaml (e.g /usr/local/etc/mc_naoqi/pepper.yaml).
If you wish to run the simulation only use simulation as a <robot_hostname>
mc_naoqi -h simulation -f <mc_rtc_configuration_file.conf>
CLI Commands
on: servo on actuatorsoff: servo off actuatorss: startsmc_rtccontroller if stopped, stops otherwisehs: go to half-sitting posturecc <controller name>: change controller
ROS Services
If mc_rtc was compiled with ROS support, then services will be available to interact with controllers. You can see the list of all services available with
rosservice list /mc_rtc
Supported robots
- Pepper (fully supported and tested)
- NAO (initial functionality implemented, to be tested)
- Romeo (not supported)
Research works that used this interface
<details> <summary>2020: <a href="https://www.youtube.com/watch?v=vDmEc1aBODA">Human-robot interaction</a></summary> <br> @inproceedings{bolotnikova2020roman, <br>  title = {Autonomous Initiation of Human Physical Assistance by a Humanoid}, <br>  author = {Anastasia Bolotnikova and S{\'e}bastien Courtois and Abderrahmane Kheddar}, <br>  booktitle = {IEEE International Conference on Robot and Human Interactive Communication}, <br>  address = {Naples, Italy}, <br>  month = {31 August--4 September}, <br>  year = {2020} <br> } </details> <details> <summary>2018: <a href="https://www.youtube.com/watch?v=NnVgbZqZebU">Compliant robot motion</a></summary> <br> @inproceedings{bolotnikova2018humanoids, <br>  title={Compliant Robot Motion Regulated via Proprioceptive Sensor Based Contact Observer}, <br>  author={Anastasia Bolotnikova and S{\'e}bastien Courtois and Abderrahmane Kheddar}, <br>  booktitle={IEEE-RAS International Conference on Humanoid Robots}, <br>  pages={854--859}, <br>  address = {Beijing, China}, <br>  month = {6--9 November}, <br>  year={2018} <br> } </details> <details> <summary>2018: <a href="https://www.youtube.com/watch?v=nY9zMG0EsnM">Contact detection</a></summary> <br> @inproceedings{bolotnikova2018roman, <br>  title = {Contact observer for humanoid robot Pepper based on tracking joint position discrepancies}, <br>  author = {Anastasia Bolotnikova and S{\'e}bastien Courtois and Abderrahmane Kheddar}, <br>  booktitle = {IEEE International Conference on Robot and Human Interactive Communication}, <br>  pages = {29--34}, <br>  address = {Nanjing, China}, <br>  month = {27--31 August}, <br>  year = {2018} <br> } </details>Acknowledgment
Thanks to @gergondet and @arntanguy for developing and helping with this interface and the mc_rtc framework