Awesome
Learning Affordance Landscapes for Interaction Exploration in 3D Environments
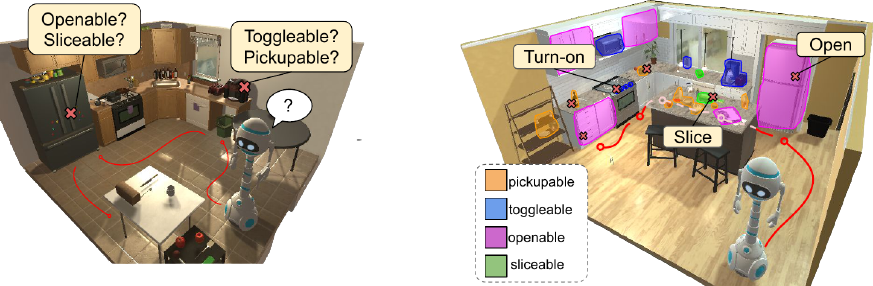
This repo contains code to train and evaluate interaction exploration agents that can discover and explore new interactions with object in their environment, while simultaneously building visual affordance models for their environment via exploration. See our project page for more details and our spotlight video.
This is the code accompanying our NeurIPS20 (spotlight) work:
Learning Affordance Landscapes for Interaction Exploration in 3D Environments
Tushar Nagarajan and Kristen Grauman.
[arxiv] [project page]
Requirements
Install required packages:
conda install pytorch==1.6.0 torchvision==0.7.0 cudatoolkit=10.1 -c pytorch
pip install -r requirements.txt
Install AI2-Thor
pip install ai2thor==2.3.8
Download the simulator files (one-time download when THOR is first run) and test the simulator with a simple keyboard controlled agent.
python kb_agent.py --x_display 0 --env-name ThorObjs-v0
Note: an X server is required to run the simulator on each GPU used for training. Code tested with Python 3.7, Pytorch 1.6, cuda 10.1
Data
Download precomputed data and model checkpoints
bash interaction_exploration/tools/download_data.sh
This will download model checkpoints for all policies trained for interaction exploration and a precomputed copy of the affordance dataset and model that is be generated with a trained policy as part of interaction exploration. The dataset/models may be generated/trained using our code, but is provided here for convenience as well.
Training interaction exploration agents
To train a simple RGB agent on GPU 0, Display :0
python -m interaction_exploration.run \
--config interaction_exploration/config/rgb.yaml \
--mode train \
SEED 0 TORCH_GPU_ID 0 X_DISPLAY :0 \
ENV.NUM_STEPS 256 \
NUM_PROCESSES 16 \
CHECKPOINT_FOLDER interaction_exploration/cv/rgb/run0/ \
To train our interaction exploration agents that use a trained affordance module
python -m interaction_exploration.run \
--config interaction_exploration/config/intexp.yaml \
--mode train \
SEED 0 TORCH_GPU_ID 0 X_DISPLAY :0 \
ENV.NUM_STEPS 256 \
NUM_PROCESSES 16 \
CHECKPOINT_FOLDER interaction_exploration/cv/intexp/run0/ \
MODEL.BEACON_MODEL affordance_seg/cv/rgb_unet/epoch=39-val_loss=0.6737.ckpt
Note: The segmentation model must be trained first. See the README in affordance_segmentation/. tl;dr First train the baseline RGB policy, then extract a dataset using rollouts from the policy, then train the segmentation model.
To train some or all models 3 times with different seeds please see and edit the train.sh script. Then run:
bash interaction_exploration/tools/train.sh
This will save checkpoints to cv/{method}/run{idx} for each method and for 3 uniquely seeded training runs.
Evaluation
To evaluate an interaction exploration model
export UNETCKPT=`ls interaction_exploration/cv/intexp/run0/unet/*.ckpt`
python -m interaction_exploration.run \
--config interaction_exploration/config/intexp.yaml \
--mode eval \
ENV.NUM_STEPS 1024 \
NUM_PROCESSES 32 \
EVAL.DATASET interaction_exploration/data/test_episodes_K_16.json \
TORCH_GPU_ID 0 X_DISPLAY :0 \
CHECKPOINT_FOLDER interaction_exploration/cv/intexp/run0/ \
LOAD interaction_exploration/cv/intexp/run0/ckpt.24.pth \
MODEL.BEACON_MODEL $UNETCKPT
To evaluate some or all trained models please see and edit the eval.sh script. Then run:
bash interaction_exploration/tools/eval.sh
Once the policy rollouts and rewards are generated, some or all model results can be visualized using
python -m interaction_exploration.tools.plot_results --cv_dir interaction_exploration/cv/ --models random rgb nav-novelty obj-coverage intexp
This should result in a curve similar to the one below, equivalent to Fig. 3 in the paper. <img src="http://vision.cs.utexas.edu/projects/interaction-exploration/media/results_github.png" height="256">
Policy visualizations
To see a trained policy in action
bash interaction_exploration/tools/enjoy.sh <config> <checkpoint_dir>
# e.g. for interaction exploration
bash interaction_exploration/tools/enjoy.sh \
interaction_exploration/config/intexp.yaml \
interaction_exploration/cv/intexp/run0
Policy visualizations will show the current egocentric view (left), and a topdown view (right) showing successful and unsuccessful interaction attempts as green and yellow dots respectively.
License
This project is released under the CC-BY-NC 4.0 license, as found in the LICENSE file.
Cite
If you find this repository useful in your own research, please consider citing:
@inproceedings{interaction-exploration,
author = {Nagarajan, Tushar and Grauman, Kristen},
title = {Learning Affordance Landscapes for Interaction Exploration in 3D Environments},
booktitle = {NeurIPS},
year = {2020}
}