Awesome
EGO-TOPO: Environment Affordances from Egocentric Video
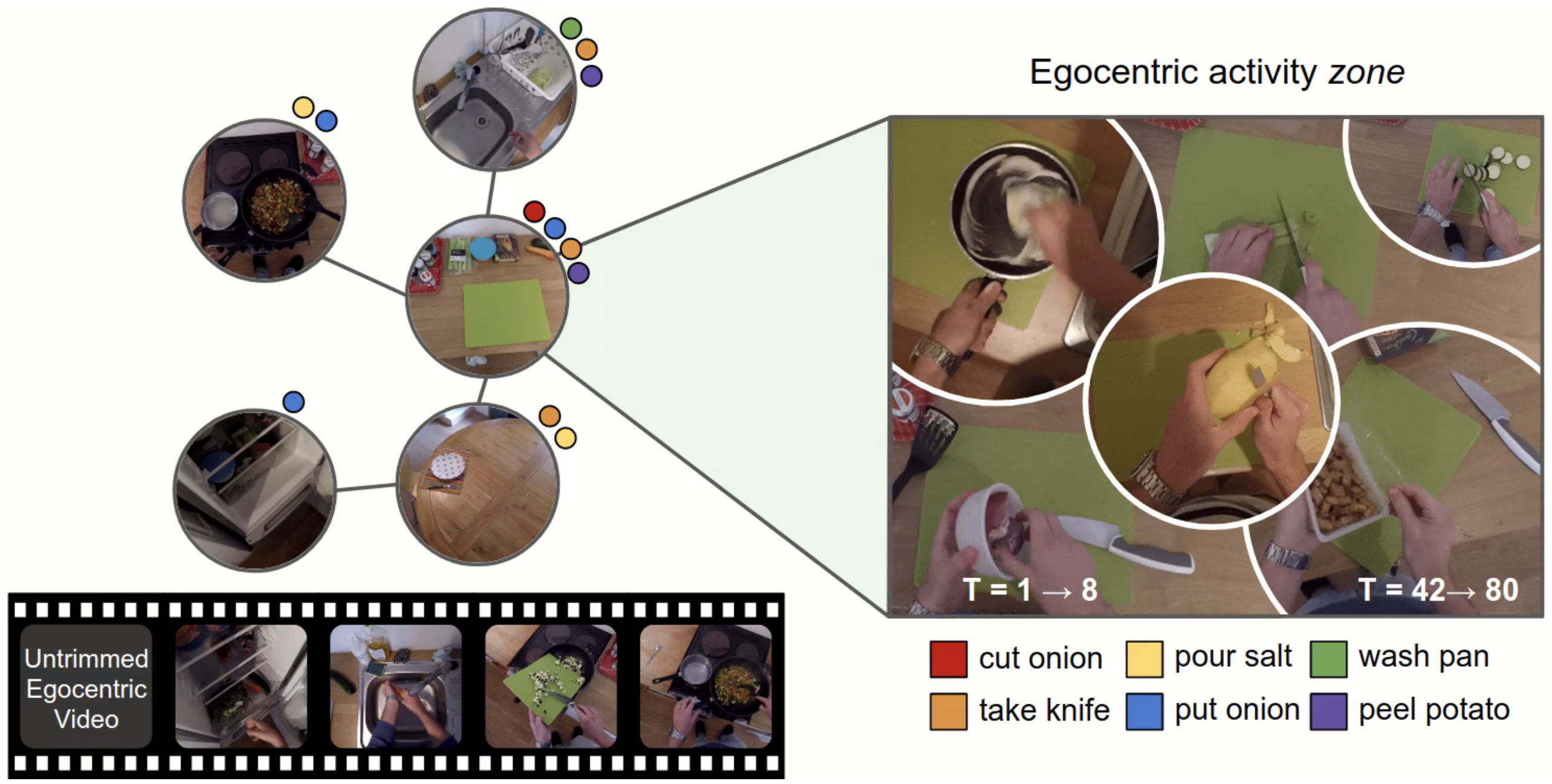
This code implements a model to parse untrimmed egocentric video into a topological graph of activity zones in the underlying environment, and associates actions that occur in the video to nodes in this graph. The topological graph serves as a structured representation of the video and can be used to discover environment affordances and help anticipate future actions in long form video. See the demo here!
This is the code accompanying our CVPR20 (oral) work:
EGO-TOPO: Environment Affordances from Egocentric Video
Tushar Nagarajan, Yanghao Li, Christoph Feichtenhofer and Kristen Grauman.
[arxiv] [project page]
Requirements
Clone the repo and the associated submodules:
git clone --recursive https://github.com/facebookresearch/ego-topo
Install required packages:
conda install pytorch==1.1.0 torchvision==0.3.0 cudatoolkit=10.0 -c pytorch
pip install -r requirements.txt
Code tested with Python 3.7, Pytorch 1.1, cuda 10.0, cudnn 7.6
Dataset and precomputed data files
Download the EPIC Kitchens 55 and EGTEA+ datasets and symlink the frames and annotations directories to the respective data folder. See detailed instructions in build_graph/data/DATASETS.md.
mkdir -p data/epic/
ln -s /path/to/EPIC_KITCHENS/epic-kitchens-55-annotations/ data/epic/annotations
ln -s /path/to/EPIC_KITCHENS/frames_rgb_flow/rgb data/epic/frames/
mkdir -p data/gtea/
ln -s /path/to/EGTEA+/action-annotation/ data/gtea/annotations
ln -s /path/to/EGTEA+/frames/rgb data/gtea/frames/
Download all precomputed features and pretrained models to construct topological graphs from videos. See requirements below for details on how to compute the required features and how to train the required models. Please see the .sh file for a list of what is downloaded.
bash data/download_data.sh
Graph construction
Construct the graph for video P26_01 in the EPIC Kitchens dataset using a trained localization network and visualize the output:
# (very slow)
python -m build_graph.build --dset epic --v_id P26_01 --locnet_wts build_graph/localization_network/cv/epic/ckpt_E_250_I_19250_L_0.368_A_0.834.pth --online --frame_inp --viz
# (fast) but requires precomputing pairwise frame similarity scores. See `build_graph/README.md`
python -m build_graph.build --dset epic --v_id P26_01 --viz
Full instructions can be found in build_graph/README.md
Long term action anticipation
Use the constructed graphs as a video representation to train action anticipation models:
cd anticipation
python -m anticipation.tools.train_recognizer epic/configs/long_term_anti/epic/verb_anti_vpretrain/gfb_gcn.py
Evaluate models using
python -m anticipation.tools.test_recognizer anticipation/configs/long_term_anti/epic/verb_anti_vpretrain/gfb_gcn.py --checkpoint pretrained/epic/gfb_gcn/latest.pth
Full instructions can be found in anticipation/README.md
Demo
Explore the constructed graphs using our method at our demo page.
License
This project is released under the CC-BY-NC 4.0 license, as found in the LICENSE file.
Cite
If you find this repository useful in your own research, please consider citing:
@inproceedings{ego-topo,
author = {Nagarajan, Tushar and Li, Yanghao and Feichtenhofer, Christoph and Grauman, Kristen},
title = {EGO-TOPO: Environment Affordances from Egocentric Video},
booktitle = {CVPR},
year = {2020}
}