Awesome
BTS
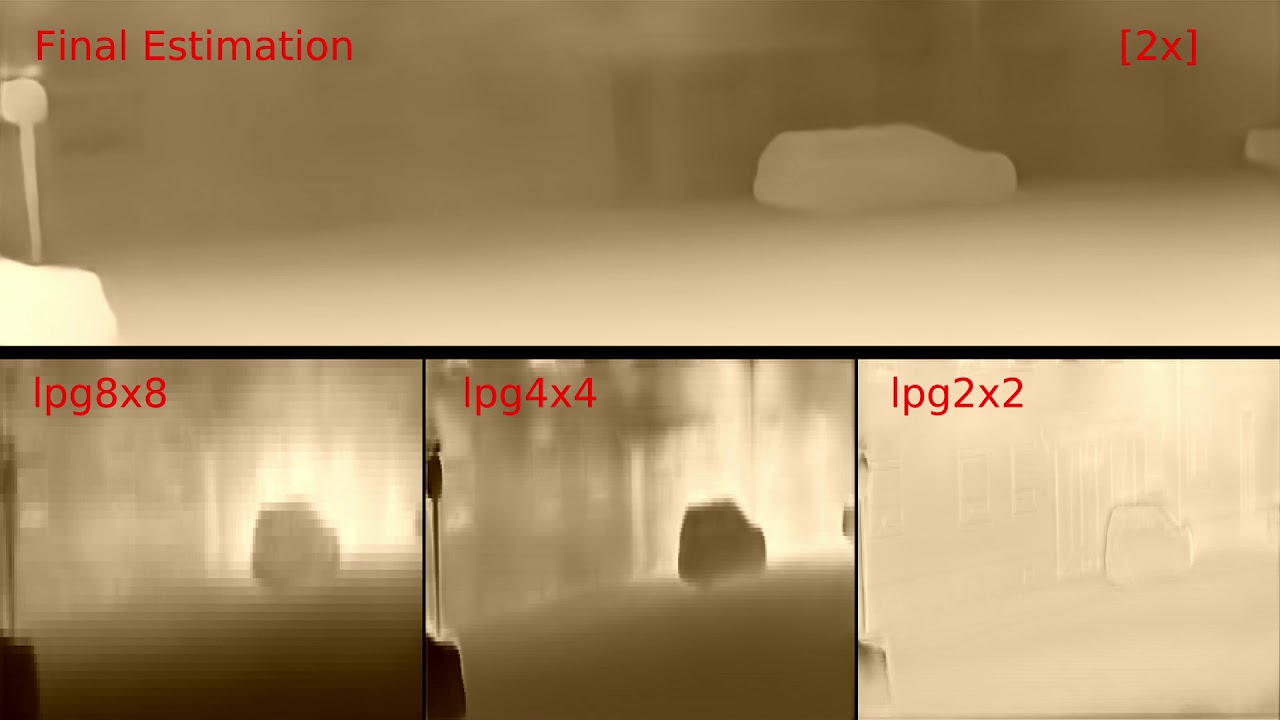
From Big to Small: Multi-Scale Local Planar Guidance for Monocular Depth Estimation
arXiv
Supplementary material
Video Demo 1
Video Demo 2

Note
This repository contains TensorFlow and PyTorch implementations of BTS.
Preparation for all implementations
$ cd ~
$ mkdir workspace
$ cd workspace
### Make a folder for datasets
$ mkdir dataset
### Clone this repo
$ git clone https://github.com/cleinc/bts
Prepare NYU Depth V2 test set
$ cd ~/workspace/bts/utils
### Get official NYU Depth V2 split file
$ wget http://horatio.cs.nyu.edu/mit/silberman/nyu_depth_v2/nyu_depth_v2_labeled.mat
### Convert mat file to image files
$ python extract_official_train_test_set_from_mat.py nyu_depth_v2_labeled.mat splits.mat ../../dataset/nyu_depth_v2/official_splits/
Prepare KITTI official ground truth depth maps
Download the ground truth depthmaps from this link KITTI.
Then,
$ cd ~/workspace/dataset
$ mkdir kitti_dataset && cd kitti_dataset
$ mv ~/Downloads/data_depth_annotated.zip .
$ unzip data_depth_annotated.zip
Follow instructions from one of the below implementations with your choice.
TensorFlow Implementation
PyTorch Implementation
Model Zoo
KITTI Eigen Split
| Base Network | cap | d1 | d2 | d3 | AbsRel | SqRel | RMSE | RMSElog | SILog | log10 | #Params | Model Download |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ResNet50 | 0-80m | 0.954 | 0.992 | 0.998 | 0.061 | 0.250 | 2.803 | 0.098 | 9.030 | 0.027 | 49.5M | bts_eigen_v2_pytorch_resnet50 |
| ResNet101 | 0-80m | 0.954 | 0.992 | 0.998 | 0.061 | 0.261 | 2.834 | 0.099 | 9.075 | 0.027 | 68.5M | bts_eigen_v2_pytorch_resnet101 |
| ResNext50 | 0-80m | 0.954 | 0.993 | 0.998 | 0.061 | 0.245 | 2.774 | 0.098 | 9.014 | 0.027 | 49.0M | bts_eigen_v2_pytorch_resnext50 |
| ResNext101 | 0-80m | 0.956 | 0.993 | 0.998 | 0.059 | 0.241 | 2.756 | 0.096 | 8.781 | 0.026 | 112.8M | bts_eigen_v2_pytorch_resnext101 |
| DenseNet121 | 0-80m | 0.951 | 0.993 | 0.998 | 0.063 | 0.256 | 2.850 | 0.100 | 9.221 | 0.028 | 21.2M | bts_eigen_v2_pytorch_densenet121 |
| DenseNet161 | 0-80m | 0.955 | 0.993 | 0.998 | 0.060 | 0.249 | 2.798 | 0.096 | 8.933 | 0.027 | 47.0M | bts_eigen_v2_pytorch_densenet161 |
NYU Depth V2
| Base Network | d1 | d2 | d3 | AbsRel | SqRel | RMSE | RMSElog | SILog | log10 | #Params | Model Download |
|---|---|---|---|---|---|---|---|---|---|---|---|
| ResNet50 | 0.865 | 0.975 | 0.993 | 0.119 | 0.075 | 0.419 | 0.152 | 12.368 | 0.051 | 49.5M | bts_nyu_v2_pytorch_resnet50 |
| ResNet101 | 0.871 | 0.977 | 0.995 | 0.113 | 0.068 | 0.407 | 0.148 | 11.886 | 0.049 | 68.5M | bts_nyu_v2_pytorch_resnet101 |
| ResNext50 | 0.867 | 0.977 | 0.995 | 0.116 | 0.070 | 0.414 | 0.150 | 12.186 | 0.050 | 49.0M | bts_nyu_v2_pytorch_resnext50 |
| ResNext101 | 0.880 | 0.977 | 0.994 | 0.111 | 0.069 | 0.399 | 0.145 | 11.680 | 0.048 | 112.8M | bts_nyu_v2_pytorch_resnext101 |
| DenseNet121 | 0.871 | 0.977 | 0.993 | 0.118 | 0.072 | 0.410 | 0.149 | 12.028 | 0.050 | 21.2M | bts_nyu_v2_pytorch_densenet121 |
| DenseNet161 | 0.885 | 0.978 | 0.994 | 0.110 | 0.066 | 0.392 | 0.142 | 11.533 | 0.047 | 47.0M | bts_nyu_v2_pytorch_densenet161 |
| MobileNetV2 | TBA | TBA | TBA | TBA | TBA | TBA | TBA | TBA | TBA | 16.3M | bts_nyu_v2_pytorch_mobilenetv2 |
Note: Modify arguments '--encoder', '--model_name', '--checkpoint_path' and '--pred_path' accordingly.
Live Demo
Finally, we attach live 3d demo implementations for both of TensorFlow and Pytorch.
For best performance, get correct intrinsic values for your webcam and put them in bts_live_3d.py.
Sample usage for PyTorch:
$ cd ~/workspace/bts/pytorch
$ python bts_live_3d.py --model_name bts_nyu_v2_pytorch_densenet161 \
--encoder densenet161_bts \
--checkpoint_path ./models/bts_nyu_v2_pytorch_densenet161/model \
--max_depth 10 \
--input_height 480 \
--input_width 640
Citation
If you find this work useful for your research, please consider citing our paper:
@article{lee2019big,
title={From big to small: Multi-scale local planar guidance for monocular depth estimation},
author={Lee, Jin Han and Han, Myung-Kyu and Ko, Dong Wook and Suh, Il Hong},
journal={arXiv preprint arXiv:1907.10326},
year={2019}
}
License
Copyright (C) 2019 Jin Han Lee, Myung-Kyu Han, Dong Wook Ko and Il Hong Suh
This Software is licensed under GPL-3.0-or-later.