Awesome
This is an OpenCV 3.0 based implementation of a monocular visual odometry algorithm.
Algorithm
Uses Nister's Five Point Algorithm for Essential Matrix estimation, and FAST features, with a KLT tracker. More details are available here as a report, and here as a blog post.
Note that this project is not yet capable of doing reliable relative scale estimation, so the scale informaion is extracted from the KITTI dataset ground truth files.
Demo Video

Requirements
OpenCV 3.0
How to compile?
Provided with this repo is a CMakeLists.txt file, which you can use to directly compile the code as follows:
mkdir build
cd build
cmake ..
make
How to run?
After compilation, in the build directly, type the following:
./vo
Before you run
In order to run this algorithm, you need to have either your own data, or else the sequences from KITTI's Visual Odometry Dataset. In order to run this algorithm on your own data, you must modify the intrinsic calibration parameters in the code.
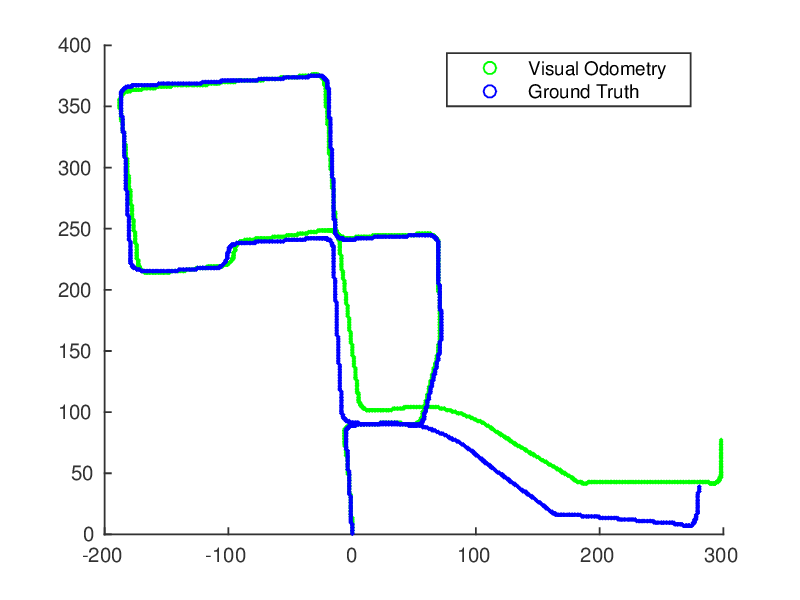
Performance
Contact
For any queries, contact: avisingh599@gmail.com
License
MIT