Awesome
![]()
![]()
![]()
RandLA-Net: Efficient Semantic Segmentation of Large-Scale Point Clouds (CVPR 2020)
This is the official implementation of RandLA-Net (CVPR2020, Oral presentation), a simple and efficient neural architecture for semantic segmentation of large-scale 3D point clouds. For technical details, please refer to:
RandLA-Net: Efficient Semantic Segmentation of Large-Scale Point Clouds <br /> Qingyong Hu, Bo Yang*, Linhai Xie, Stefano Rosa, Yulan Guo, Zhihua Wang, Niki Trigoni, Andrew Markham. <br /> [Paper] [Video] [Blog] [Project page] <br />
<p align="center"> <img src="http://randla-net.cs.ox.ac.uk/imgs/Fig3.png" width="100%"> </p>(1) Setup
This code has been tested with Python 3.5, Tensorflow 1.11, CUDA 9.0 and cuDNN 7.4.1 on Ubuntu 16.04.
- Clone the repository
git clone --depth=1 https://github.com/QingyongHu/RandLA-Net && cd RandLA-Net
- Setup python environment
conda create -n randlanet python=3.5
source activate randlanet
pip install -r helper_requirements.txt
sh compile_op.sh
Update 03/21/2020, pre-trained models and results are available now.
You can download the pre-trained models and results here.
Note that, please specify the model path in the main function (e.g., main_S3DIS.py) if you want to use the pre-trained model and have a quick try of our RandLA-Net.
(2) S3DIS
S3DIS dataset can be found
<a href="https://docs.google.com/forms/d/e/1FAIpQLScDimvNMCGhy_rmBA2gHfDu3naktRm6A8BPwAWWDv-Uhm6Shw/viewform?c=0&w=1">here</a>.
Download the files named "Stanford3dDataset_v1.2_Aligned_Version.zip". Uncompress the folder and move it to
/data/S3DIS.
- Preparing the dataset:
python utils/data_prepare_s3dis.py
- Start 6-fold cross validation:
sh jobs_6_fold_cv_s3dis.sh
- Move all the generated results (*.ply) in
/testfolder to/data/S3DIS/results, calculate the final mean IoU results:
python utils/6_fold_cv.py
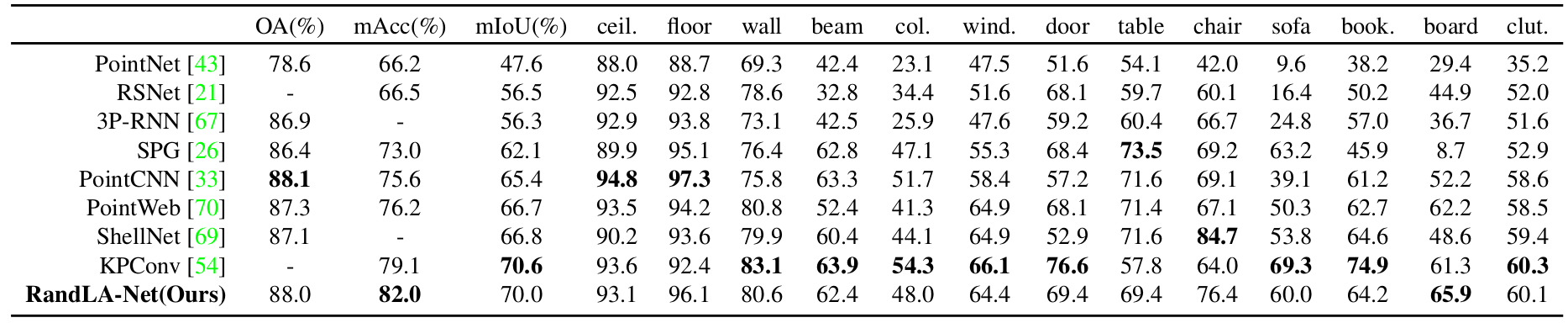
Quantitative results of different approaches on S3DIS dataset (6-fold cross-validation):
Qualitative results of our RandLA-Net:
 |  |
|---|
(3) Semantic3D
7zip is required to uncompress the raw data in this dataset, to install p7zip:
sudo apt-get install p7zip-full
- Download and extract the dataset. First, please specify the path of the dataset by changing the
BASE_DIRin "download_semantic3d.sh"
sh utils/download_semantic3d.sh
- Preparing the dataset:
python utils/data_prepare_semantic3d.py
- Start training:
python main_Semantic3D.py --mode train --gpu 0
- Evaluation:
python main_Semantic3D.py --mode test --gpu 0
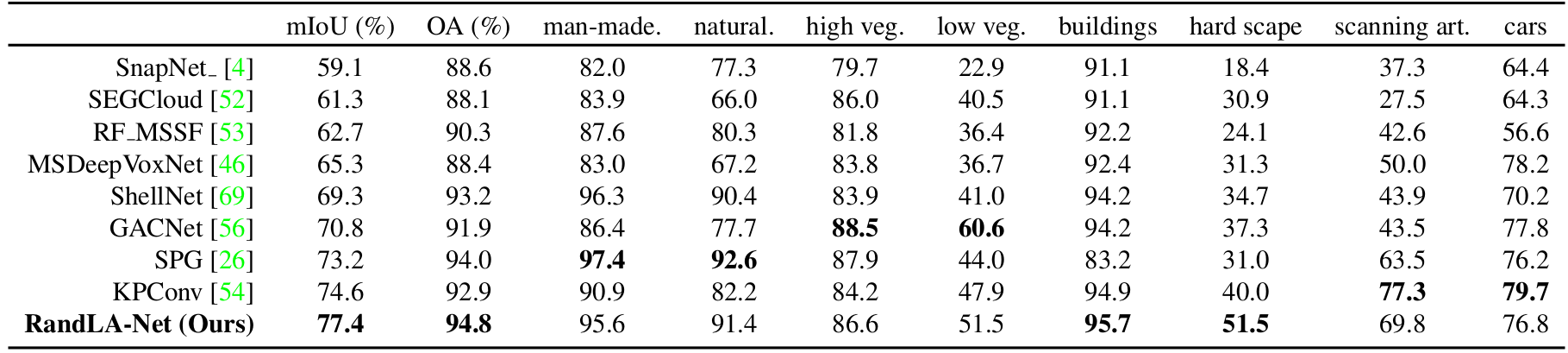
Quantitative results of different approaches on Semantic3D (reduced-8):
Qualitative results of our RandLA-Net:
 |  |
|---|---|
 |  |
Note:
- Preferably with more than 64G RAM to process this dataset due to the large volume of point cloud
(4) SemanticKITTI
SemanticKITTI dataset can be found <a href="http://semantic-kitti.org/dataset.html#download">here</a>. Download the files
related to semantic segmentation and extract everything into the same folder. Uncompress the folder and move it to
/data/semantic_kitti/dataset.
- Preparing the dataset:
python utils/data_prepare_semantickitti.py
- Start training:
python main_SemanticKITTI.py --mode train --gpu 0
- Evaluation:
sh jobs_test_semantickitti.sh
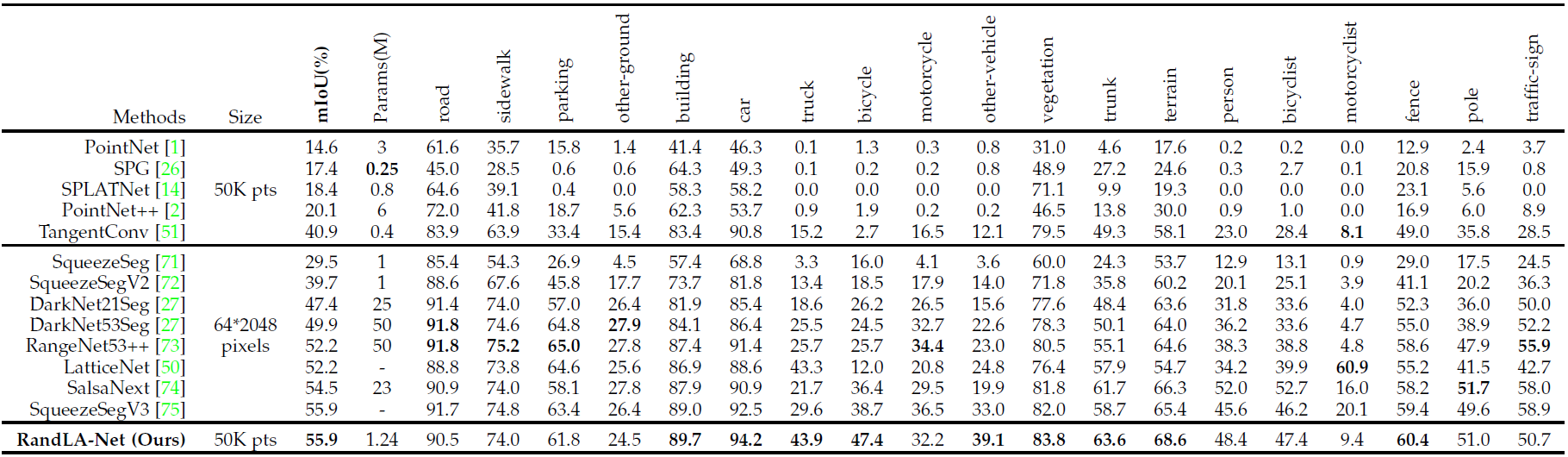
Quantitative results of different approaches on SemanticKITTI dataset:
Qualitative results of our RandLA-Net:

(5) Demo
<p align="center"> <a href="https://youtu.be/Ar3eY_lwzMk"><img src="http://randla-net.cs.ox.ac.uk/imgs/demo_cover.png" width="80%"></a> </p>Citation
If you find our work useful in your research, please consider citing:
@article{hu2019randla,
title={RandLA-Net: Efficient Semantic Segmentation of Large-Scale Point Clouds},
author={Hu, Qingyong and Yang, Bo and Xie, Linhai and Rosa, Stefano and Guo, Yulan and Wang, Zhihua and Trigoni, Niki and Markham, Andrew},
journal={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
year={2020}
}
@article{hu2021learning,
title={Learning Semantic Segmentation of Large-Scale Point Clouds with Random Sampling},
author={Hu, Qingyong and Yang, Bo and Xie, Linhai and Rosa, Stefano and Guo, Yulan and Wang, Zhihua and Trigoni, Niki and Markham, Andrew},
journal={IEEE Transactions on Pattern Analysis and Machine Intelligence},
year={2021},
publisher={IEEE}
}
Acknowledgment
- Part of our code refers to <a href="https://github.com/jlblancoc/nanoflann">nanoflann</a> library and the the recent work <a href="https://github.com/HuguesTHOMAS/KPConv">KPConv</a>.
- We use <a href="https://www.blender.org/">blender</a> to make the video demo.
License
Licensed under the CC BY-NC-SA 4.0 license, see LICENSE.
Updates
- 21/03/2020: Updating all experimental results
- 21/03/2020: Adding pretrained models and results
- 02/03/2020: Code available!
- 15/11/2019: Initial release!
Related Repos
- SoTA-Point-Cloud: Deep Learning for 3D Point Clouds: A Survey

- SensatUrban: Learning Semantics from Urban-Scale Photogrammetric Point Clouds

- 3D-BoNet: Learning Object Bounding Boxes for 3D Instance Segmentation on Point Clouds

- SpinNet: Learning a General Surface Descriptor for 3D Point Cloud Registration

- SQN: Weakly-Supervised Semantic Segmentation of Large-Scale 3D Point Clouds with 1000x Fewer Labels
