Awesome
Intel® Open Image Denoise
This is release v2.3.1 of Intel Open Image Denoise. For changes and new features see the changelog. Visit https://www.openimagedenoise.org for more information.
Overview
Intel Open Image Denoise is an open source library of high-performance, high-quality denoising filters for images rendered with ray tracing. Intel Open Image Denoise is part of the Intel® Rendering Toolkit and is released under the permissive Apache 2.0 license.
The purpose of Intel Open Image Denoise is to provide an open, high-quality, efficient, and easy-to-use denoising library that allows one to significantly reduce rendering times in ray tracing based rendering applications. It filters out the Monte Carlo noise inherent to stochastic ray tracing methods like path tracing, reducing the amount of necessary samples per pixel by even multiple orders of magnitude (depending on the desired closeness to the ground truth). A simple but flexible C/C++ API ensures that the library can be easily integrated into most existing or new rendering solutions.
At the heart of the Intel Open Image Denoise library is a collection of efficient deep learning based denoising filters, which were trained to handle a wide range of samples per pixel (spp), from 1 spp to almost fully converged. Thus it is suitable for both preview and final-frame rendering. The filters can denoise images either using only the noisy color (beauty) buffer, or, to preserve as much detail as possible, can optionally utilize auxiliary feature buffers as well (e.g. albedo, normal). Such buffers are supported by most renderers as arbitrary output variables (AOVs) or can be usually implemented with little effort.
Although the library ships with a set of pre-trained filter models, it is not mandatory to use these. To optimize a filter for a specific renderer, sample count, content type, scene, etc., it is possible to train the model using the included training toolkit and user-provided image datasets.
Intel Open Image Denoise supports a wide variety of CPUs and GPUs from different vendors:
-
Intel® 64 architecture compatible CPUs (with at least SSE4.1)
-
ARM64 (AArch64) architecture CPUs (e.g. Apple silicon CPUs)
-
Intel Xe and Xe2 architecture dedicated and integrated GPUs, including Intel® Arc™ A-Series Graphics, Intel® Data Center GPU Flex Series, Intel® Data Center GPU Max Series, Intel® Iris® Xe Graphics, Intel® Core™ Ultra Processors with Intel® Arc™ Graphics, 11th-14th Gen Intel® Core™ processor graphics, and related Intel Pentium® and Celeron® processors (Xe-LP, Xe-LPG, Xe-LPG+, Xe-HPG, Xe-HPC, Xe2-LPG, and Xe2-HPG microarchitectures)
-
NVIDIA GPUs with Volta, Turing, Ampere, Ada Lovelace, and Hopper architectures
-
AMD GPUs with RDNA2 (Navi 21 only) and RDNA3 (Navi 3x) architectures
-
Apple silicon GPUs (M1 and newer)
It runs on most machines ranging from laptops to workstations and compute nodes in HPC systems. It is efficient enough to be suitable not only for offline rendering, but, depending on the hardware used, also for interactive or even real-time ray tracing.
Intel Open Image Denoise exploits modern instruction sets like SSE4, AVX2, AVX-512, and NEON on CPUs, Intel® Xe Matrix Extensions (Intel® XMX) on Intel GPUs, and tensor cores on NVIDIA GPUs to achieve high denoising performance.
System Requirements
You need an Intel® 64 (with SSE4.1) or ARM64 architecture compatible CPU to run Intel Open Image Denoise, and you need a 64-bit Windows, Linux, or macOS operating system as well.
For Intel GPU support, please also install the latest Intel graphics drivers:
-
Windows: Intel® Graphics Driver 31.0.101.4953 or newer
-
Linux: Intel® software for General Purpose GPU capabilities release 20230323 or newer
Using older driver versions is not supported and Intel Open Image Denoise might run with only limited capabilities, have suboptimal performance or might be unstable. Also, Resizable BAR must be enabled in the BIOS for Intel dedicated GPUs if running on Linux, and strongly recommended if running on Windows.
For NVIDIA GPU support, please also install the latest NVIDIA graphics drivers:
-
Windows: Version 452.39 or newer
-
Linux: Version 450.80.02 or newer
For AMD GPU support, please also install the latest AMD graphics drivers:
-
Windows: AMD Software: Adrenalin Edition 24.10.1 or newer
-
Linux: Radeon Software for Linux version 24.20.3 or newer
For Apple GPU support, macOS Ventura or newer is required.
Support and Contact
Intel Open Image Denoise is under active development, and though we do our best to guarantee stable release versions a certain number of bugs, as-yet-missing features, inconsistencies, or any other issues are still possible. Should you find any such issues please report them immediately via the Intel Open Image Denoise GitHub Issue Tracker (or, if you should happen to have a fix for it, you can also send us a pull request); for missing features please contact us via email at openimagedenoise@googlegroups.com.
Join our mailing list to receive release announcements and major news regarding Intel Open Image Denoise.
Citation
If you use Intel Open Image Denoise in a research publication, please cite the project using the following BibTeX entry:
@misc{OpenImageDenoise,
author = {Attila T. {\'A}fra},
title = {{Intel\textsuperscript{\textregistered} Open Image Denoise}},
year = {2024},
note = {\url{https://www.openimagedenoise.org}}
}
Compilation
The latest Intel Open Image Denoise sources are always available at the
Intel Open Image Denoise GitHub
repository. The default
master branch should always point to the latest tested bugfix release.
Prerequisites
You can clone the latest Intel Open Image Denoise sources using Git with the Git Large File Storage (LFS) extension installed:
git clone --recursive https://github.com/OpenImageDenoise/oidn.git
Please note that installing the Git LFS extension is required to correctly clone the repository. Cloning without Git LFS will seemingly succeed but actually some of the files will be invalid and thus compilation will fail.
Intel Open Image Denoise currently supports 64-bit Linux, Windows, and macOS operating systems. Before you can build Intel Open Image Denoise you need the following basic prerequisites:
-
CMake 3.15 or newer
-
A C++11 compiler (we recommend using a Clang-based compiler but also support GCC and Microsoft Visual Studio 2015 and newer)
-
Python 3
To build support for different types of CPUs and GPUs, the following additional prerequisites are needed:
CPU device:
-
Intel® SPMD Program Compiler (ISPC) 1.21.0 or newer. Please obtain a release of ISPC from the ISPC downloads page. The build system looks for ISPC in the
PATHand in the directory right “next to” the checked-out Intel Open Image Denoise sources. For example, if Intel Open Image Denoise is in~/Projects/oidn, ISPC will also be searched in~/Projects/ispc-v1.21.0-linux. Alternatively set the CMake variableISPC_EXECUTABLEto the location of the ISPC compiler. -
Intel® Threading Building Blocks (TBB) 2017 or newer
SYCL device for Intel GPUs:
-
oneAPI DPC++ Compiler, one of the following versions (other versions are not supported):
- oneAPI DPC++
Compiler 2023-10-26.
This is the open source version of the compiler, which is more
up-to-date but less stable, so we strongly recommend to use
this exact version. On Linux we also recommend to rebuild it
from source with the
--disable-fusionflag to minimize the size of the SYCL runtime. - oneAPI DPC++ Compiler 2022-12. Must be rebuilt from source.
- Intel® oneAPI DPC++/C++ Compiler 2024.1 or newer
- oneAPI DPC++
Compiler 2023-10-26.
This is the open source version of the compiler, which is more
up-to-date but less stable, so we strongly recommend to use
this exact version. On Linux we also recommend to rebuild it
from source with the
-
Intel® Graphics Offline Compiler for OpenCL™ Code (OCLOC)
-
Windows: Version 2025.0.0 / 32.0.101.6129 or newer as a standalone component of Intel® oneAPI Toolkits, which must be extracted and its contents added to the
PATH. Also included with Intel® oneAPI Base Toolkit. -
Linux: Included with Intel® software for General Purpose GPU capabilities release 2441.19 or newer (install at least
intel-opencl-icdon Ubuntu,intel-oclocon RHEL or SLES). Also available with Intel® Graphics Compute Runtime for oneAPI Level Zero and OpenCL™ Driver.
-
-
If using Intel® oneAPI DPC++/C++ Compiler: CMake 3.25.2 or newer
-
Ninja or Make as the CMake generator. The Visual Studio generator is not supported.
CUDA device for NVIDIA GPUs:
-
CMake 3.18 or newer
-
NVIDIA CUDA Toolkit 11.8 or newer
HIP device for AMD GPUs:
-
CMake 3.21 or newer
-
Ninja or Make as the CMake generator. The Visual Studio generator is not supported.
-
AMD ROCm (HIP SDK) v6.1.2 or newer.
-
Perl (e.g. Strawberry Perl on Windows)
Metal device for Apple GPUs:
Depending on your operating system, you can install some required
dependencies (e.g., TBB) using yum or apt-get on Linux,
Homebrew or MacPorts on
macOS, and vcpkg on Windows. For the other
dependencies please download the necessary packages or installers and
follow the included instructions.
Compiling on Linux/macOS
If you are building with SYCL support on Linux, make sure that the DPC++ compiler is properly set up. The open source oneAPI DPC++ Compiler can be downloaded and simply extracted. However, before using the compiler, the environment must be set up as well with the following command:
source ./dpcpp_compiler/startup.sh
The startup.sh script will put clang and clang++ from the oneAPI
DPC++ Compiler into your PATH.
Alternatively, if you have installed Intel® oneAPI DPC++/C++ Compiler
instead, you can set up the compiler by sourcing the vars.sh script in
the env directory of the compiler install directory, for example,
source /opt/intel/oneAPI/compiler/latest/env/vars.sh
This script will put the icx and icpx compiler executables from the
Intel(R) oneAPI DPC++/C++ Compiler in your PATH.
-
Create a build directory, and go into it using a command prompt
mkdir oidn/build cd oidn/build(We do recommend having separate build directories for different configurations such as release, debug, etc.).
-
CMake will use the default compiler, which on most Linux machines is
gcc, but it can be switched toclangby executing the following:cmake -G Ninja -DCMAKE_C_COMPILER=clang -DCMAKE_CXX_COMPILER=clang++ ..If you are building with SYCL support, you must set the DPC++ compiler (
clang/clang++oricx/icpx) as the C/C++ compiler here. Note that the compiler variables cannot be changed after the firstcmakeorccmakerun. -
Open the CMake configuration dialog
ccmake .. -
Make sure to properly set the build mode and enable the components and options you need. By default only CPU support is built, so SYCL and other device support must be enabled manually (e.g. with the
OIDN_DEVICE_SYCLoption). Then type ’c’onfigure and ’g’enerate. When back on the command prompt, build the library usingninja
Compiling on Windows
If you are building with SYCL support, make sure that the DPC++ compiler is properly set up. The open source oneAPI DPC++ Compiler can be downloaded and simply extracted. However, before using the compiler, the environment must be set up. To achieve this, open the “x64 Native Tools Command Prompt for VS” that ships with Visual Studio and execute the following commands:
set "DPCPP_DIR=path_to_dpcpp_compiler"
set "PATH=%DPCPP_DIR%\bin;%PATH%"
set "PATH=%DPCPP_DIR%\lib;%PATH%"
set "CPATH=%DPCPP_DIR%\include;%CPATH%"
set "INCLUDE=%DPCPP_DIR%\include;%INCLUDE%"
set "LIB=%DPCPP_DIR%\lib;%LIB%"
The path_to_dpcpp_compiler should point to the unpacked oneAPI DPC++
Compiler.
Alternatively, if you have installed Intel® oneAPI DPC++/C++ Compiler
instead, you can either open a regular “Command Prompt” and execute the
vars.bat script in the env directory of the compiler install
directory, for example
C:\Program Files (x86)\Intel\oneAPI\compiler\latest\env\vars.bat
or simply open the installed “Intel oneAPI command prompt for Intel 64
for Visual Studio”. Either way, the icx compiler executable from the
Intel® oneAPI DPC++/C++ Compiler will be added to your PATH.
On Windows we highly recommend to use Ninja as the CMake generator because not all devices can be built using the Visual Studio generator (e.g. SYCL).
-
Create a build directory, and go into it using a Visual Studio command prompt
mkdir oidn/build cd oidn/build(We do recommend having separate build directories for different configurations such as release, debug, etc.).
-
CMake will use the default compiler, which on most Windows machines is MSVC, but it can be switched to
clangby executing the following:cmake -G Ninja -DCMAKE_C_COMPILER=clang -DCMAKE_CXX_COMPILER=clang++ ..If you are building with SYCL support, you must set the DPC++ compiler (
clang/clang++oricx) as the C/C++ compiler here. Note that the compiler variables cannot be changed after the firstcmakeorcmake-guirun. -
Open the CMake GUI (
cmake-gui.exe)cmake-gui .. -
Make sure to properly set the build mode and enable the components and options you need. By default only CPU support is built, so SYCL and other device support must be enabled manually (e.g.
OIDN_DEVICE_SYCLoption). Then click on Configure and Generate. When back on the command prompt, build the library usingninja
CMake Configuration
The following list describes the options that can be configured in CMake:
-
CMAKE_BUILD_TYPE: Can be used to switch between Debug mode (Debug), Release mode (Release) (default), and Release mode with enabled assertions and debug symbols (RelWithDebInfo). -
OIDN_STATIC_LIB: Build Open Image Denoise as a static (if only CPU support is enabled) or a hybrid static/shared (if GPU support is enabled as well) library. -
OIDN_LIBRARY_NAME: Specifies the base name of the Open Image Denoise library files (OpenImageDenoiseby default). -
OIDN_API_NAMESPACE: Specifies a namespace to put all Open Image Denoise API symbols inside. This is also added as an outer namespace for the C++ wrapper API. By default no namespace is used and plain C symbols are exported. -
OIDN_DEVICE_CPU: Enable CPU device support (ON by default). -
OIDN_DEVICE_SYCL: Enable SYCL device support for Intel GPUs (OFF by default). -
OIDN_DEVICE_SYCL_AOT: Enable ahead-of-time (AOT) compilation for SYCL kernels (ON by default). Turning this off removes dependency on OCLOC at build time and decreases binary size but significantly increases initialization time at runtime, so it is recommended only for development. -
OIDN_DEVICE_CUDA: Enable CUDA device support for NVIDIA GPUs (OFF by default). -
OIDN_DEVICE_CUDA_API: Use the CUDA driver API (Driver, default), the static CUDA runtime library (RuntimeStatic), or the shared CUDA runtime library (RuntimeShared). -
OIDN_DEVICE_HIP: Enable HIP device support for AMD GPUs (OFF by default). -
OIDN_DEVICE_METAL: Enable Metal device support for Apple GPUs (OFF by default). -
OIDN_FILTER_RT: Include the trained weights of theRTfilter in the build (ON by default). Turning this OFF significantly decreases the size of the library binary, while the filter remains functional if the weights are set by the user at runtime. -
OIDN_FILTER_RTLIGHTMAP: Include the trained weights of theRTLightmapfilter in the build (ON by default). -
OIDN_APPS: Enable building example and test applications (ON by default). -
OIDN_APPS_OPENIMAGEIO: Enable OpenImageIO support in the example and test applications to be able to load/save OpenEXR, PNG, and other image file formats (OFF by default). -
OIDN_INSTALL_DEPENDENCIES: Enable installing the dependencies (e.g. TBB, SYCL runtime) as well. -
TBB_ROOT: The path to the TBB installation (autodetected by default). -
ROCM_PATH: The path to the ROCm installation (autodetected by default). -
OpenImageIO_ROOT: The path to the OpenImageIO installation (autodetected by default).
Documentation
The following documentation of Intel Open Image Denoise can also be found as a pdf document.
Open Image Denoise API
Open Image Denoise provides a C99 API (also compatible with C++) and a C++11 wrapper API as well. For simplicity, this document mostly refers to the C99 version of the API.
The API is designed in an object-oriented manner, e.g. it contains
device objects (OIDNDevice type), buffer objects (OIDNBuffer type),
and filter objects (OIDNFilter type). All objects are
reference-counted, and handles can be released by calling the
appropriate release function (e.g. oidnReleaseDevice) or retained by
incrementing the reference count (e.g. oidnRetainDevice).
An important aspect of objects is that setting their parameters do not have an immediate effect (with a few exceptions). Instead, objects with updated parameters are in an unusable state until the parameters get explicitly committed to a given object. The commit semantic allows for batching up multiple small changes, and specifies exactly when changes to objects will occur.
All API calls are thread-safe, but operations that use the same device will be serialized, so the amount of API calls from different threads should be minimized.
Examples
To have a quick overview of the C99 and C++11 APIs, see the following simple example code snippets.
Basic Denoising (C99 API)
#include <OpenImageDenoise/oidn.h>
...
// Create an Open Image Denoise device
OIDNDevice device = oidnNewDevice(OIDN_DEVICE_TYPE_DEFAULT); // CPU or GPU if available
// OIDNDevice device = oidnNewDevice(OIDN_DEVICE_TYPE_CPU);
oidnCommitDevice(device);
// Create buffers for input/output images accessible by both host (CPU) and device (CPU/GPU)
OIDNBuffer colorBuf = oidnNewBuffer(device, width * height * 3 * sizeof(float));
OIDNBuffer albedoBuf = ...
// Create a filter for denoising a beauty (color) image using optional auxiliary images too
// This can be an expensive operation, so try not to create a new filter for every image!
OIDNFilter filter = oidnNewFilter(device, "RT"); // generic ray tracing filter
oidnSetFilterImage(filter, "color", colorBuf,
OIDN_FORMAT_FLOAT3, width, height, 0, 0, 0); // beauty
oidnSetFilterImage(filter, "albedo", albedoBuf,
OIDN_FORMAT_FLOAT3, width, height, 0, 0, 0); // auxiliary
oidnSetFilterImage(filter, "normal", normalBuf,
OIDN_FORMAT_FLOAT3, width, height, 0, 0, 0); // auxiliary
oidnSetFilterImage(filter, "output", colorBuf,
OIDN_FORMAT_FLOAT3, width, height, 0, 0, 0); // denoised beauty
oidnSetFilterBool(filter, "hdr", true); // beauty image is HDR
oidnCommitFilter(filter);
// Fill the input image buffers
float* colorPtr = (float*)oidnGetBufferData(colorBuf);
...
// Filter the beauty image
oidnExecuteFilter(filter);
// Check for errors
const char* errorMessage;
if (oidnGetDeviceError(device, &errorMessage) != OIDN_ERROR_NONE)
printf("Error: %s\n", errorMessage);
// Cleanup
oidnReleaseBuffer(colorBuf);
...
oidnReleaseFilter(filter);
oidnReleaseDevice(device);
Basic Denoising (C++11 API)
#include <OpenImageDenoise/oidn.hpp>
...
// Create an Open Image Denoise device
oidn::DeviceRef device = oidn::newDevice(); // CPU or GPU if available
// oidn::DeviceRef device = oidn::newDevice(oidn::DeviceType::CPU);
device.commit();
// Create buffers for input/output images accessible by both host (CPU) and device (CPU/GPU)
oidn::BufferRef colorBuf = device.newBuffer(width * height * 3 * sizeof(float));
oidn::BufferRef albedoBuf = ...
// Create a filter for denoising a beauty (color) image using optional auxiliary images too
// This can be an expensive operation, so try no to create a new filter for every image!
oidn::FilterRef filter = device.newFilter("RT"); // generic ray tracing filter
filter.setImage("color", colorBuf, oidn::Format::Float3, width, height); // beauty
filter.setImage("albedo", albedoBuf, oidn::Format::Float3, width, height); // auxiliary
filter.setImage("normal", normalBuf, oidn::Format::Float3, width, height); // auxiliary
filter.setImage("output", colorBuf, oidn::Format::Float3, width, height); // denoised beauty
filter.set("hdr", true); // beauty image is HDR
filter.commit();
// Fill the input image buffers
float* colorPtr = (float*)colorBuf.getData();
...
// Filter the beauty image
filter.execute();
// Check for errors
const char* errorMessage;
if (device.getError(errorMessage) != oidn::Error::None)
std::cout << "Error: " << errorMessage << std::endl;
Denoising with Prefiltering (C++11 API)
// Create a filter for denoising a beauty (color) image using prefiltered auxiliary images too
oidn::FilterRef filter = device.newFilter("RT"); // generic ray tracing filter
filter.setImage("color", colorBuf, oidn::Format::Float3, width, height); // beauty
filter.setImage("albedo", albedoBuf, oidn::Format::Float3, width, height); // auxiliary
filter.setImage("normal", normalBuf, oidn::Format::Float3, width, height); // auxiliary
filter.setImage("output", outputBuf, oidn::Format::Float3, width, height); // denoised beauty
filter.set("hdr", true); // beauty image is HDR
filter.set("cleanAux", true); // auxiliary images will be prefiltered
filter.commit();
// Create a separate filter for denoising an auxiliary albedo image (in-place)
oidn::FilterRef albedoFilter = device.newFilter("RT"); // same filter type as for beauty
albedoFilter.setImage("albedo", albedoBuf, oidn::Format::Float3, width, height);
albedoFilter.setImage("output", albedoBuf, oidn::Format::Float3, width, height);
albedoFilter.commit();
// Create a separate filter for denoising an auxiliary normal image (in-place)
oidn::FilterRef normalFilter = device.newFilter("RT"); // same filter type as for beauty
normalFilter.setImage("normal", normalBuf, oidn::Format::Float3, width, height);
normalFilter.setImage("output", normalBuf, oidn::Format::Float3, width, height);
normalFilter.commit();
// Prefilter the auxiliary images
albedoFilter.execute();
normalFilter.execute();
// Filter the beauty image
filter.execute();
Upgrading from Open Image Denoise 1.x
Open Image Denoise 2 introduces GPU support, which requires implementing some minor changes in applications. There are also small API changes, additions and improvements in this new version. In this section we summarize the necessary code modifications and also briefly mention the new features that users might find useful when upgrading to version 2.x. For a full description of the changes and new functionality, please see the API reference.
Buffers
The most important required change is related to how data is passed to
Open Image Denoise. If the application is explicitly using only the CPU
(by specifying OIDN_DEVICE_TYPE_CPU), no changes should be necessary.
But if it wants to support GPUs as well, passing pointers to memory
allocated with the system allocator (e.g. malloc) would raise an error
because GPUs cannot access such memory in almost all cases.
To ensure compatibility with any kind of device, including GPUs, the
application should use OIDNBuffer objects to store all image data
passed to the library. Memory allocated using buffers is by default
accessible by both the host (CPU) and the device (CPU or GPU).
Ideally, the application should directly read and write image data to/from such buffers to avoid redundant and inefficient data copying. If this cannot be implemented, the application should try to minimize the overhead of copying as much as possible:
-
Data should be copied to/from buffers only if the data in system memory indeed cannot be accessed by the device. This can be determined by simply querying the
systemMemorySupporteddevice parameter. If system allocated memory is accessible by the device, no buffers are necessary and filter image parameters can be set withoidnSetSharedFilterImage. -
If the image data cannot be accessed by the device, buffers must be created and the data must be copied to/from these buffers. These buffers should be directly passed to filters as image parameters instead of the original pointers using
oidnSetFilterImage. -
Data should be copied asynchronously using using the new
oidnReadBufferAsyncandoidnWriteBufferAsyncfunctions, which may achieve higher performance than plainmemcpy. -
If image data must be copied, using the default buffer allocation may not be the most efficient method. If the device memory is not physically shared with the host memory (e.g. for dedicated GPUs), higher performance may be achieved by creating the buffers with device storage (
OIDN_STORAGE_DEVICE) using the newoidnNewBufferWithStoragefunction. This way, the buffer data cannot be directly accessed by the host anymore but this should not matter because the data must be copied from some other memory location anyway. However, this ensures that the data is stored only in high-performance device memory, and the user has full control over when and how the data is transferred between host and device.
The oidnMapBuffer and oidnUnmapBuffer functions have been removed
from the API due to these not being supported by any of the device
backends. Please use oidnReadBuffer(Async) and
oidnWriteBuffer(Async) instead.
Interop with Compute (SYCL, CUDA, HIP) and Graphics (DX, Vulkan, Metal) APIs
If the application is explicitly using a particular device type which
supports unified memory allocations, e.g. SYCL or CUDA, it may directly
pass pointers allocated using the native allocator of the respective
compute API (e.g. sycl::malloc_device, cudaMalloc) instead of using
buffers. This way, it is the responsibility of the user to correctly
allocate the memory for the device.
In such cases, it often necessary to have more control over the device
creation as well, to ensure that filtering is running on the intended
device and command queues or streams from the application can be shared
to improve performance. If the application is using the same compute or
graphics API as the Open Image Denoise device, this can be achieved by
creating devices with oidnNewSYCLDevice, oidnNewCUDADevice, etc. For
some APIs there are additional interoperability functions as well,
e.g. oidnExecuteSYCLFilterAsync.
If the application is using a graphics API which does not support
unified memory allocations, e.g. DX12 or Vulkan, it may be still
possible to share memory between the application and Open Image Denoise
using buffers, avoiding expensive copying through host memory. External
buffers can be imported from graphics APIs with the new
oidnNewSharedBufferFromFD and oidnNewSharedBufferFromWin32Handle
functions. To use this feature, buffers must be exported in the graphics
API and must be imported in Open Image Denoise using the same kind of
handle. Care must be taken to select an external memory handle type
which is supported by both APIs. The external memory types supported by
an Open Image Denoise device can be queried using the
externalMemoryTypes device parameter. Note that some devices do not
support importing external memory at all (e.g. CPUs, and on GPUs it
primarily depends on the installed drivers), so the application should
always implement a fallback too, which copies the data through the host
if there is no other supported way. Metal buffers can be used directly
with the oidnNewSharedBufferFromMetal function.
Sharing textures is currently not supported natively but it is still
possible avoid copying texture data by using a linear texture layout
(e.g. VK_IMAGE_TILING_LINEAR in Vulkan) and sharing the buffer that
backs this data. In this case, you should ensure that the row stride of
the linear texture data is correctly set.
Importing external synchronization primitives (e.g. semaphores) from
graphics APIs is not yet supported either but it is planned for a future
release. Meanwhile, synchronizing access to shared memory should be done
on the host using oidnSyncDevice and the used graphics API.
When importing external memory, the application also needs to make sure that the Open Image Denoise device is running on the same physical device as the graphics API. This can be easily achieved by using the new physical device feature, described in the next section.
Physical Devices
Although it is possible to explicitly create devices of a particular
type (with, e.g., OIDN_DEVICE_TYPE_SYCL), this is often insufficient,
especially if the system has multiple devices of the same type, and with
GPU support it is very common that there are multiple different types of
supported devices in the system (e.g. a CPU and one or more GPUs).
Open Image Denoise 2 introduces a simple physical device API, which
enables the application to query the list of supported physical devices
in the system, including their name, type, UUID, LUID, PCI address, etc.
(see oidnGetNumPhysicalDevices, oidnGetPhysicalDeviceString, etc.).
New logical device (i.e. OIDNDevice) creation functions for have been
also introduced, which enable creating a logical device on a specific
physical device: oidnNewDeviceByID, oidnNewDeviceByUUID, etc.
Creating a logical device on a physical device having a particular UUID, LUID or PCI address is particularly important when importing external memory from graphics APIs. However, not all device types support all types of IDs, and some graphics drivers may even report mismatching UUIDs or LUIDs for the same physical device, so applications should try to implement multiple identification methods, or at least assume that identification might fail.
Asynchronous Execution
It is now possible to execute some operations asynchronously, most
importantly filtering (oidnExecuteFilterAsync,
oidnExecuteSYCLFilterAsync) and copying data (the already mentioned
oidnReadBufferAsync and oidnWriteBufferAsync).
When using any asynchronous function it is the responsibility of the
application to handle correct synchronization using oidnSyncDevice.
Filter Quality
Open Image Denoise still delivers the same high image quality on all
device types as before, including on GPUs. But often filtering
performance is more important than having the highest possible image
quality, so it is now possible to switch between multiple filter quality
modes. Filters have a new parameter called quality, which defaults to
the existing high image quality (OIDN_QUALITY_HIGH) but balanced
(OIDN_QUALITY_BALANCED) and fast (OIDN_QUALITY_FAST) quality modes
have been added as well for even higher performance. We recommend using
balanced or fast quality for interactive and real-time use cases.
Small API Changes
A few existing API functions have been renamed to improve clarity (e.g.
oidnSetFilter1i to oidnSetFilterInt) but the old function names are
still available as deprecated functions. When compiling legacy code,
warnings will be emitted for these deprecated functions. To upgrade to
the new API, please simply follow the instructions in the warnings.
Some filter parameters have been also renamed (alignment to
tileAlignment, overlap to tileOverlap). When using the old names,
warnings will be emitted at runtime.
Building as a Static Library
The support to build Open Image Denoise as a static library
(OIDN_STATIC_LIB CMake option) has been limited to CPU-only builds due
to switching to a modular library design that was necessary for adding
multi-vendor GPU support. If the library is built with GPU support as
well, the OIDN_STATIC_LIB option is still available but enabling it
results in a hybrid static/shared library.
If the main reason for building as a static library would be is the
ability to use multiple versions of Open Image Denoise in the same
process, please use the existing OIDN_API_NAMESPACE CMake option
instead. With this feature all symbols of the library will be put into a
custom namespace, which can prevent symbol clashes.
Physical Devices
Systems often have multiple different types of devices supported by Open Image Denoise (CPUs and GPUs). The application can get the list of supported physical devices and select which of these to use for denoising.
The number of supported physical devices can be queried with
int oidnGetNumPhysicalDevices();
The physical devices can be identified using IDs between 0 and
(oidnGetNumPhysicalDevices() (-) 1), and are ordered approximately
from fastest to slowest (e.g., ID of 0 corresponds to the likely fastest
physical device). Note that the reported number and order of physical
devices may change between application runs, so no assumptions should be
made about this list.
Parameters of these physical devices can be queried using
bool oidnGetPhysicalDeviceBool (int physicalDeviceID, const char* name);
int oidnGetPhysicalDeviceInt (int physicalDeviceID, const char* name);
unsigned int oidnGetPhysicalDeviceUInt (int physicalDeviceID, const char* name);
const char* oidnGetPhysicalDeviceString(int physicalDeviceID, const char* name);
const void* oidnGetPhysicalDeviceData (int physicalDeviceID, const char* name,
size_t* byteSize);
where name is the name of the parameter, and byteSize is the number
of returned bytes for data parameters. The following parameters can be
queried:
| Type | Name | Description |
|---|---|---|
Int | type | device type as an OIDNDeviceType value |
String | name | name string |
Bool | uuidSupported | device supports universally unique identifier (UUID) |
Data | uuid | opaque UUID (OIDN_UUID_SIZE bytes, exists only if uuidSupported is true) |
Bool | luidSupported | device supports locally unique identifier (UUID) |
Data | luid | opaque LUID (OIDN_LUID_SIZE bytes, exists only if luidSupported is true) |
UInt | nodeMask | bitfield identifying the node within a linked device adapter corresponding to the device (exists only if luidSupported is true) |
Bool | pciAddressSupported | device supports PCI address |
Int | pciDomain | PCI domain (exists only if pciAddressSupported is true) |
Int | pciBus | PCI bus (exists only if pciAddressSupported is true) |
Int | pciDevice | PCI device (exists only if pciAddressSupported is true) |
Int | pciFunction | PCI function (exists only if pciAddressSupported is true) |
Constant parameters supported by physical devices.
It is also possible to directly query whether a physical device of a particular type is supported, without iterating over all supported physical devices:
bool oidnIsCPUDeviceSupported();
bool oidnIsSYCLDeviceSupported(const sycl::device* device);
bool oidnIsCUDADeviceSupported(int deviceID);
bool oidnIsHIPDeviceSupported(int deviceID);
bool oidnIsMetalDeviceSupported(MTLDevice_id device);
Devices
Open Image Denoise has a logical device concept as well, or simply referred to as device, which allows different components of the application to use the Open Image Denoise API without interfering with each other. Each physical device may be associated with one ore more logical devices. A basic way to create a device is by calling
OIDNDevice oidnNewDevice(OIDNDeviceType type);
where the type enumeration maps to a specific device implementation,
which can be one of the following:
| Name | Description |
|---|---|
OIDN_DEVICE_TYPE_DEFAULT | select the likely fastest device (same as physical device with ID 0) |
OIDN_DEVICE_TYPE_CPU | CPU device |
OIDN_DEVICE_TYPE_SYCL | SYCL device (requires a supported Intel GPU) |
OIDN_DEVICE_TYPE_CUDA | CUDA device (requires a supported NVIDIA GPU) |
OIDN_DEVICE_TYPE_HIP | HIP device (requires a supported AMD GPU) |
OIDN_DEVICE_TYPE_METAL | Metal device (requires a supported Apple GPU) |
Supported device types, i.e., valid constants of type OIDNDeviceType.
If there are multiple supported devices of the specified type, an implementation-dependent default will be selected.
A device can be created by specifying a physical device ID as well using
OIDNDevice oidnNewDeviceByID(int physicalDeviceID);
Applications can manually iterate over the list of physical devices and select from them based on their properties but there are also some built-in helper functions as well, which make creating a device by a particular physical device property easier:
OIDNDevice oidnNewDeviceByUUID(const void* uuid);
OIDNDevice oidnNewDeviceByLUID(const void* luid);
OIDNDevice oidnNewDeviceByPCIAddress(int pciDomain, int pciBus, int pciDevice,
int pciFunction);
These functions are particularly useful when the application needs interoperability with a graphics API (e.g. DX12, Vulkan). However, not all of these properties may be supported by the intended physical device (or drivers might even report inconsistent identifiers), so it is recommended to select by more than one property, if possible.
If the application requires interoperability with a particular compute or graphics API (SYCL, CUDA, HIP, Metal), it is recommended to use one of the following dedicated functions instead:
OIDNDevice oidnNewSYCLDevice(const sycl::queue* queues, int numQueues);
OIDNDevice oidnNewCUDADevice(const int* deviceIDs, const cudaStream_t* streams,
int numPairs);
OIDNDevice oidnNewHIPDevice(const int* deviceIDs, const hipStream_t* streams,
int numPairs);
OIDNDevice oidnNewMetalDevice(const MTLCommandQueue_id* commandQueues,
int numQueues);
For SYCL, it is possible to pass one or more SYCL queues which will be used by Open Image Denoise for all device operations. This is useful when the application wants to use the same queues for both denoising and its own operations (e.g. rendering). Passing multiple queues is not intended to be used for different physical devices but just for a single SYCL root-device which consists of multiple sub-devices (e.g. Intel® Data Center GPU Max Series having multiple Xe-Stacks/tiles). The only supported SYCL backend is oneAPI Level Zero.
For CUDA and HIP, pairs of CUDA/HIP device IDs and corresponding streams
can be specified but the current implementation supports only one pair.
A NULL stream corresponds to the default stream on the corresponding
device. Open Image Denoise automatically sets and restores the current
CUDA/HIP device/context on the calling thread when necessary, thus the
current device does not have to be changed manually by the application.
For Metal, a single command queue is supported.
Once a device is created, you can call
bool oidnGetDeviceBool(OIDNDevice device, const char* name);
void oidnSetDeviceBool(OIDNDevice device, const char* name, bool value);
int oidnGetDeviceInt (OIDNDevice device, const char* name);
void oidnSetDeviceInt (OIDNDevice device, const char* name, int value);
int oidnGetDeviceUInt(OIDNDevice device, const char* name);
void oidnSetDeviceUInt(OIDNDevice device, const char* name, unsigned int value);
to set and get parameter values on the device. Note that some parameters are constants, thus trying to set them is an error. See the tables below for the parameters supported by devices.
| Type | Name | Default | Description |
|---|---|---|---|
Int | type | constant | device type as an OIDNDeviceType value |
Int | version | constant | combined version number (major.minor.patch) with two decimal digits per component |
Int | versionMajor | constant | major version number |
Int | versionMinor | constant | minor version number |
Int | versionPatch | constant | patch version number |
Bool | systemMemorySupported | constant | device can directly access memory allocated with the system allocator (e.g. malloc) |
Bool | managedMemorySupported | constant | device supports buffers created with managed storage (OIDN_STORAGE_MANAGED) |
Int | externalMemoryTypes | constant | bitfield of OIDNExternalMemoryTypeFlag values representing the external memory types supported by the device |
Int | verbose | 0 | verbosity level of the console output between 0–4; when set to 0, no output is printed, when set to a higher level more output is printed |
Parameters supported by all devices.
| Type | Name | Default | Description |
|---|---|---|---|
Int | numThreads | 0 | maximum number of threads which the library should use; 0 will set it automatically to get the best performance |
Bool | setAffinity | true | enables thread affinitization (pinning software threads to hardware threads) if it is necessary for achieving optimal performance |
Additional parameters supported only by CPU devices.
Note that the CPU device heavily relies on setting the thread affinities
to achieve optimal performance, so it is highly recommended to leave
this option enabled. However, this may interfere with the application if
that also sets the thread affinities, potentially causing performance
degradation. In such cases, the recommended solution is to either
disable setting the affinities in the application or in Open Image
Denoise, or to always set/reset the affinities before/after each
parallel region in the application (e.g., if using TBB, with
tbb::task_arena and tbb::task_scheduler_observer).
Once parameters are set on the created device, the device must be committed with
void oidnCommitDevice(OIDNDevice device);
This device can then be used to construct further objects, such as buffers and filters. Note that a device can be committed only once during its lifetime.
Some functions may execute asynchronously with respect to the host. The
names of these functions are suffixed with Async. Asynchronous
operations are executed in order on the device but may not block on
the host. Eventually, it is necessary to wait for all asynchronous
operations to complete, which can be done by calling
void oidnSyncDevice(OIDNDevice device);
If any errors have occurred during asynchronous operations (e.g.,
cancellation through a progress monitor callback), those will be
reported only when synchronization is triggered explicitly with
oidnSyncDevice or implicitly with some other API call (e.g.,
oidnExecuteFilter, oidnCommitFilter).
Before the application exits, it should release all devices by invoking
void oidnReleaseDevice(OIDNDevice device);
Note that Open Image Denoise uses reference counting for all object types, so this function decreases the reference count of the device, and if the count reaches 0 the device will automatically get deleted. It is also possible to increase the reference count by calling
void oidnRetainDevice(OIDNDevice device);
An application should typically create only a single device object per physical device (one for all CPUs or one per GPU) as creation can be very expensive and additional device objects may incur a significant memory overhead. If required differently, it should only use a small number of device objects at any given time.
Error Handling
Each user thread has its own error code per device. If an error occurs when calling an API function, this error code is set to the occurred error if it stores no previous error. The currently stored error can be queried by the application via
OIDNError oidnGetDeviceError(OIDNDevice device, const char** outMessage);
where outMessage can be a pointer to a C string which will be set to a
more descriptive error message, or it can be NULL. This function also
clears the error code, which assures that the returned error code is
always the first error occurred since the last invocation of
oidnGetDeviceError on the current thread. Note that the optionally
returned error message string is valid only until the next invocation of
the function.
Alternatively, the application can also register a callback function of type
typedef void (*OIDNErrorFunction)(void* userPtr, OIDNError code, const char* message);
via
void oidnSetDeviceErrorFunction(OIDNDevice device, OIDNErrorFunction func, void* userPtr);
to get notified when errors occur. Only a single callback function can
be registered per device, and further invocations overwrite the
previously set callback function, which do not require also calling
the oidnCommitDevice function. Passing NULL as function pointer
disables the registered callback function. When the registered callback
function is invoked, it gets passed the user-defined payload (userPtr
argument as specified at registration time), the error code (code
argument) of the occurred error, as well as a string (message
argument) that further describes the error. The error code is always set
even if an error callback function is registered. It is recommended to
always set a error callback function, to detect all errors.
When the device construction fails, oidnNewDevice returns NULL as
device. To detect the error code of a such failed device construction,
pass NULL as device to the oidnGetDeviceError function. For all
other invocations of oidnGetDeviceError, a proper device handle must
be specified.
The following errors are currently used by Open Image Denoise:
| Name | Description |
|---|---|
OIDN_ERROR_NONE | no error occurred |
OIDN_ERROR_UNKNOWN | an unknown error occurred |
OIDN_ERROR_INVALID_ARGUMENT | an invalid argument was specified |
OIDN_ERROR_INVALID_OPERATION | the operation is not allowed |
OIDN_ERROR_OUT_OF_MEMORY | not enough memory to execute the operation |
OIDN_ERROR_UNSUPPORTED_HARDWARE | the hardware (CPU/GPU) is not supported |
OIDN_ERROR_CANCELLED | the operation was cancelled by the user |
Possible error codes, i.e., valid constants of type OIDNError.
Environment Variables
Open Image Denoise supports environment variables for overriding certain settings at runtime, which can be useful for debugging and development:
| Name | Description |
|---|---|
OIDN_DEFAULT_DEVICE | overrides what physical device to use with OIDN_DEVICE_TYPE_DEFAULT; can be cpu, sycl, cuda, hip, or a physical device ID |
OIDN_DEVICE_CPU | value of 0 disables CPU device support |
OIDN_DEVICE_SYCL | value of 0 disables SYCL device support |
OIDN_DEVICE_CUDA | value of 0 disables CUDA device support |
OIDN_DEVICE_HIP | value of 0 disables HIP device support |
OIDN_DEVICE_METAL | value of 0 disables Metal device support |
OIDN_NUM_THREADS | overrides numThreads device parameter |
OIDN_SET_AFFINITY | overrides setAffinity device parameter |
OIDN_NUM_SUBDEVICES | overrides number of SYCL sub-devices to use (e.g. for Intel® Data Center GPU Max Series) |
OIDN_VERBOSE | overrides verbose device parameter |
Environment variables supported by Open Image Denoise.
Buffers
Image data can be passed to Open Image Denoise either via pointers to memory allocated and managed by the user or by creating buffer objects. Regardless of which method is used, the data must be allocated in a way that it is accessible by the device (either CPU or GPU). Using buffers is typically the preferred approach because this ensures that the allocation requirements are fulfilled regardless of device type. To create a new data buffer with memory allocated and owned by the device, use
OIDNBuffer oidnNewBuffer(OIDNDevice device, size_t byteSize);
The created buffer is bound to the specified device (device argument).
The specified number of bytes (byteSize) are allocated at buffer
construction time and deallocated when the buffer is destroyed. The
memory is by default allocated as managed memory automatically migrated
between host and device, if supported, or as pinned host memory
otherwise.
If this default buffer allocation is not suitable, a buffer can be created with a manually specified storage mode as well:
OIDNBuffer oidnNewBufferWithStorage(OIDNDevice device, size_t byteSize, OIDNStorage storage);
The supported storage modes are the following:
| Name | Description |
|---|---|
OIDN_STORAGE_UNDEFINED | undefined storage mode |
OIDN_STORAGE_HOST | pinned host memory, accessible by both host and device |
OIDN_STORAGE_DEVICE | device memory, not accessible by the host |
OIDN_STORAGE_MANAGED | automatically migrated between host and device, accessible by both (not supported by all devices, managedMemorySupported device parameter must be checked before use) |
Supported storage modes for buffers, i.e., valid constants of type
OIDNStorage.
Note that the host and device storage modes are supported by all devices
but managed storage is an optional feature. Before using managed
storage, the managedMemorySupported device parameter should be
queried.
It is also possible to create a “shared” data buffer with memory allocated and managed by the user with
OIDNBuffer oidnNewSharedBuffer(OIDNDevice device, void* devPtr, size_t byteSize);
where devPtr points to user-managed device-accessible memory and
byteSize is its size in bytes. At buffer construction time no buffer
data is allocated, but the buffer data provided by the user is used. The
buffer data must remain valid for as long as the buffer may be used, and
the user is responsible to free the buffer data when no longer required.
The user must also ensure that the memory is accessible to the device by
using a supported allocation function (e.g., sycl::malloc_device,
cudaMalloc, hipMalloc) and alignment (e.g., Metal requires the
allocation to be page-aligned).
Buffers can be also imported from graphics APIs as external memory, to avoid expensive copying of data through host memory. Different types of external memory can be imported from either POSIX file descriptors or Win32 handles using
OIDNBuffer oidnNewSharedBufferFromFD(OIDNDevice device,
OIDNExternalMemoryTypeFlag fdType,
int fd, size_t byteSize);
OIDNBuffer oidnNewSharedBufferFromWin32Handle(OIDNDevice device,
OIDNExternalMemoryTypeFlag handleType,
void* handle, const void* name, size_t byteSize);
Before exporting memory from the graphics API, the application should
find a handle type which is supported by both the Open Image Denoise
device (see externalMemoryTypes device parameter) and the graphics
API. Note that different GPU vendors may support different handle types.
To ensure compatibility with all device types, applications should
support at least OIDN_EXTERNAL_MEMORY_TYPE_FLAG_OPAQUE_FD on Windows
and both OIDN_EXTERNAL_MEMORY_TYPE_FLAG_OPAQUE_FD and
OIDN_EXTERNAL_MEMORY_TYPE_FLAG_DMA_BUF on Linux. All possible external
memory types are listed in the table below.
| Name | Description |
|---|---|
OIDN_EXTERNAL_MEMORY_TYPE_FLAG_NONE | |
OIDN_EXTERNAL_MEMORY_TYPE_FLAG_OPAQUE_FD | opaque POSIX file descriptor handle (recommended on Linux) |
OIDN_EXTERNAL_MEMORY_TYPE_FLAG_DMA_BUF | file descriptor handle for a Linux dma_buf (recommended on Linux) |
OIDN_EXTERNAL_MEMORY_TYPE_FLAG_OPAQUE_WIN32 | NT handle (recommended on Windows) |
OIDN_EXTERNAL_MEMORY_TYPE_FLAG_OPAQUE_WIN32_KMT | global share (KMT) handle |
OIDN_EXTERNAL_MEMORY_TYPE_FLAG_D3D11_TEXTURE | NT handle returned by IDXGIResource1::CreateSharedHandle referring to a Direct3D 11 texture resource |
OIDN_EXTERNAL_MEMORY_TYPE_FLAG_D3D11_TEXTURE_KMT | global share (KMT) handle returned by IDXGIResource::GetSharedHandle referring to a Direct3D 11 texture resource |
OIDN_EXTERNAL_MEMORY_TYPE_FLAG_D3D11_RESOURCE | NT handle returned by IDXGIResource1::CreateSharedHandle referring to a Direct3D 11 resource |
OIDN_EXTERNAL_MEMORY_TYPE_FLAG_D3D11_RESOURCE_KMT | global share (KMT) handle returned by IDXGIResource::GetSharedHandle referring to a Direct3D 11 resource |
OIDN_EXTERNAL_MEMORY_TYPE_FLAG_D3D12_HEAP | NT handle returned by ID3D12Device::CreateSharedHandle referring to a Direct3D 12 heap resource |
OIDN_EXTERNAL_MEMORY_TYPE_FLAG_D3D12_RESOURCE | NT handle returned by ID3D12Device::CreateSharedHandle referring to a Direct3D 12 committed resource |
Supported external memory type flags, i.e., valid constants of type
OIDNExternalMemoryTypeFlag.
Metal buffers can be imported directly with
OIDNBuffer oidnNewSharedBufferFromMetal(OIDNDevice device, MTLBuffer_id buffer);
Note that if a buffer with an MTLStorageModeManaged storage mode is
imported, it is the responsibility of the user to synchronize the
contents of the buffer between the host and the device.
Similar to device objects, buffer objects are also reference-counted and can be retained and released by calling the following functions:
void oidnRetainBuffer (OIDNBuffer buffer);
void oidnReleaseBuffer(OIDNBuffer buffer);
The size of in bytes and storage mode of the buffer can be queried using
size_t oidnGetBufferSize (OIDNBuffer buffer);
OIDNStorage oidnGetBufferStorage(OIDNBuffer buffer);
It is possible to get a pointer directly to the buffer data, which is usually the preferred way to access the data stored in the buffer:
void* oidnGetBufferData(OIDNBuffer buffer);
Accessing the data on the host through this pointer is possible only
if the buffer was created with OIDN_STORAGE_HOST or
OIDN_STORAGE_MANAGED. Note that a NULL pointer may be returned if
the buffer is empty.
In some cases better performance can be achieved by using device storage for buffers. Such data can be accessed on the host by copying to/from host memory (including pageable system memory) using the following functions:
void oidnReadBuffer(OIDNBuffer buffer,
size_t byteOffset, size_t byteSize, void* dstHostPtr);
void oidnWriteBuffer(OIDNBuffer buffer,
size_t byteOffset, size_t byteSize, const void* srcHostPtr);
These functions will always block until the read/write operation has been completed, which is often suboptimal. The following functions execute these operations asynchronously:
void oidnReadBufferAsync(OIDNBuffer buffer,
size_t byteOffset, size_t byteSize, void* dstHostPtr);
void oidnWriteBufferAsync(OIDNBuffer buffer,
size_t byteOffset, size_t byteSize, const void* srcHostPtr);
When copying asynchronously, the user must ensure correct
synchronization with the device by calling oidnSyncDevice before
accessing the copied data or releasing the buffer. Failure to do so will
result in undefined behavior.
Data Format
Buffers store opaque data and thus have no information about the type
and format of the data. Other objects, e.g. filters, typically require
specifying the format of the data stored in buffers or shared via
pointers. This can be done using the OIDNFormat enumeration type:
| Name | Description |
|---|---|
OIDN_FORMAT_UNDEFINED | undefined format |
OIDN_FORMAT_FLOAT | 32-bit floating-point scalar |
OIDN_FORMAT_FLOAT[234] | 32-bit floating-point [234]-element vector |
OIDN_FORMAT_HALF | 16-bit floating-point scalar |
OIDN_FORMAT_HALF[234] | 16-bit floating-point [234]-element vector |
Supported data formats, i.e., valid constants of type OIDNFormat.
Filters
Filters are the main objects in Open Image Denoise that are responsible for the actual denoising. The library ships with a collection of filters which are optimized for different types of images and use cases. To create a filter object, call
OIDNFilter oidnNewFilter(OIDNDevice device, const char* type);
where type is the name of the filter type to create. The supported
filter types are documented later in this section.
Creating filter objects can be very expensive, therefore it is strongly recommended to reuse the same filter for denoising as many images as possible, as long as the these images have the same same size, format, and features (i.e., only the memory locations and pixel values may be different). Otherwise (e.g. for images with different resolutions), reusing the same filter would not have any benefits.
Once created, filter objects can be retained and released with
void oidnRetainFilter (OIDNFilter filter);
void oidnReleaseFilter(OIDNFilter filter);
After creating a filter, it needs to be set up by specifying the input and output images, and potentially setting other parameter values as well.
To set image parameters of a filter, you can use one of the following functions:
void oidnSetFilterImage(OIDNFilter filter, const char* name,
OIDNBuffer buffer, OIDNFormat format,
size_t width, size_t height,
size_t byteOffset,
size_t pixelByteStride, size_t rowByteStride);
void oidnSetSharedFilterImage(OIDNFilter filter, const char* name,
void* devPtr, OIDNFormat format,
size_t width, size_t height,
size_t byteOffset,
size_t pixelByteStride, size_t rowByteStride);
It is possible to specify either a data buffer object (buffer
argument) with the oidnSetFilterImage function, or directly a pointer
to user-managed device-accessible data (devPtr argument) with the
oidnSetSharedFilterImage function. Regardless of whether a buffer or a
pointer is specified, the data must be accessible to the device. The
easiest way to guarantee this regardless of the device type (CPU or GPU)
is using buffer objects.
In both cases, you must also specify the name of the image parameter to
set (name argument, e.g. "color", "output"), the pixel format
(format argument), the width and height of the image in number of
pixels (width and height arguments), the starting offset of the
image data (byteOffset argument), the pixel stride (pixelByteStride
argument) and the row stride (rowByteStride argument), in number of
bytes.
If the pixels and/or rows are stored contiguously (tightly packed
without any gaps), you can set pixelByteStride and/or rowByteStride
to 0 to let the library compute the actual strides automatically, as a
convenience.
Images support only FLOAT and HALF pixel formats with up to 3
channels. Custom image layouts with extra channels (e.g. alpha channel)
or other data are supported as well by specifying a non-zero pixel
stride. This way, expensive image layout conversion and copying can be
avoided but the extra channels will be ignored by the filter. If these
channels also need to be denoised, separate filters can be used.
To unset a previously set image parameter, returning it to a state as if it had not been set, call
void oidnRemoveFilterImage(OIDNFilter filter, const char* name);
Some special data used by filters are opaque/untyped (e.g. trained model
weights blobs), which can be specified with the
oidnSetSharedFilterData function:
void oidnSetSharedFilterData(OIDNFilter filter, const char* name,
void* hostPtr, size_t byteSize);
This data (hostPtr) must be accessible to the host, therefore system
memory allocation is suitable (i.e., there is no reason to use buffer
objects for allocation).
Modifying the contents of an opaque data parameter after setting it as a filter parameter is allowed but the filter needs to be notified that the data has been updated by calling
void oidnUpdateFilterData(OIDNFilter filter, const char* name);
Unsetting an opaque data parameter can be performed with
void oidnRemoveFilterData(OIDNFilter filter, const char* name);
Filters may have parameters other than buffers as well, which you can set and get using the following functions:
bool oidnGetFilterBool (OIDNFilter filter, const char* name);
void oidnSetFilterBool (OIDNFilter filter, const char* name, bool value);
int oidnGetFilterInt (OIDNFilter filter, const char* name);
void oidnSetFilterInt (OIDNFilter filter, const char* name, int value);
float oidnGetFilterFloat(OIDNFilter filter, const char* name);
void oidnSetFilterFloat(OIDNFilter filter, const char* name, float value);
Filters support a progress monitor callback mechanism that can be used
to report progress of filter operations and to cancel them as well.
Calling oidnSetFilterProgressMonitorFunction registers a progress
monitor callback function (func argument) with payload (userPtr
argument) for the specified filter (filter argument):
typedef bool (*OIDNProgressMonitorFunction)(void* userPtr, double n);
void oidnSetFilterProgressMonitorFunction(OIDNFilter filter,
OIDNProgressMonitorFunction func,
void* userPtr);
Only a single callback function can be registered per filter, and
further invocations overwrite the previously set callback function.
Passing NULL as function pointer disables the registered callback
function. Once registered, Open Image Denoise will invoke the callback
function multiple times during filter operations, by passing the payload
as set at registration time (userPtr argument), and a double in the
range [0, 1] which estimates the progress of the operation (n
argument). When returning true from the callback function, Open Image
Denoise will continue the filter operation normally. When returning
false, the library will attempt to cancel the filter operation as soon
as possible, and if that is fulfilled, it will raise an
OIDN_ERROR_CANCELLED error. Note that cancellation is not guaranteed.
Using a progress monitor callback function introduces some overhead, which may be significant on GPU devices, hurting performance. Therefore we strongly recommend progress monitoring only for offline denoising, when denoising an image is expected to take several seconds.
After setting all necessary parameters for the filter, the changes must be committed by calling
void oidnCommitFilter(OIDNFilter filter);
The parameters can be updated after committing the filter, but it must be re-committed for any new changes to take effect. Committing major changes to the filter (e.g. setting new image parameters, changing the image resolution) can be expensive, and thus should not be done frequently (e.g. per frame).
Finally, an image can be filtered by executing the filter with
void oidnExecuteFilter(OIDNFilter filter);
which will read the input image data from the specified buffers and produce the denoised output image.
This function will always block until the filtering operation has been completed. The following function executes the operation asynchronously:
void oidnExecuteFilterAsync(OIDNFilter filter);
For filters created on a SYCL device it is also possible to specify
dependent SYCL events (depEvents and numDepEvents arguments, may be
NULL/0) and get a completion event as well (doneEvent argument, may
be NULL):
void oidnExecuteSYCLFilterAsync(OIDNFilter filter,
const sycl::event* depEvents, int numDepEvents,
sycl::event* doneEvent);
When filtering asynchronously, the user must ensure correct
synchronization with the device by calling oidnSyncDevice before
accessing the output image data or releasing the filter. Failure to do
so will result in undefined behavior.
In the following we describe the different filters that are currently implemented in Open Image Denoise.
RT
The RT (ray tracing) filter is a generic ray tracing denoising
filter which is suitable for denoising images rendered with Monte Carlo
ray tracing methods like unidirectional and bidirectional path tracing.
It supports depth of field and motion blur as well, but it is not
temporally stable. The filter is based on a convolutional neural network
(CNN) and comes with a set of pre-trained models that work well with a
wide range of ray tracing based renderers and noise levels.
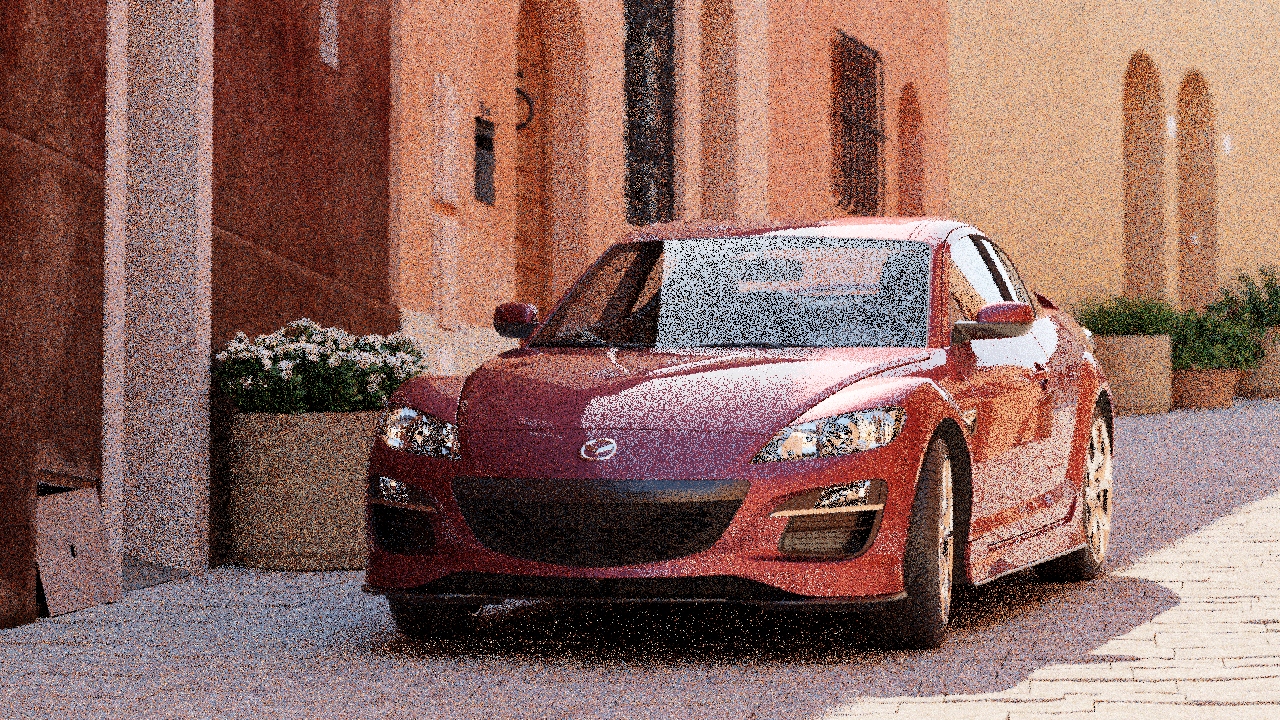 Example noisy beauty image rendered using unidirectional path tracing
(4 samples per pixel). Scene by
Evermotion.
Example noisy beauty image rendered using unidirectional path tracing
(4 samples per pixel). Scene by
Evermotion.
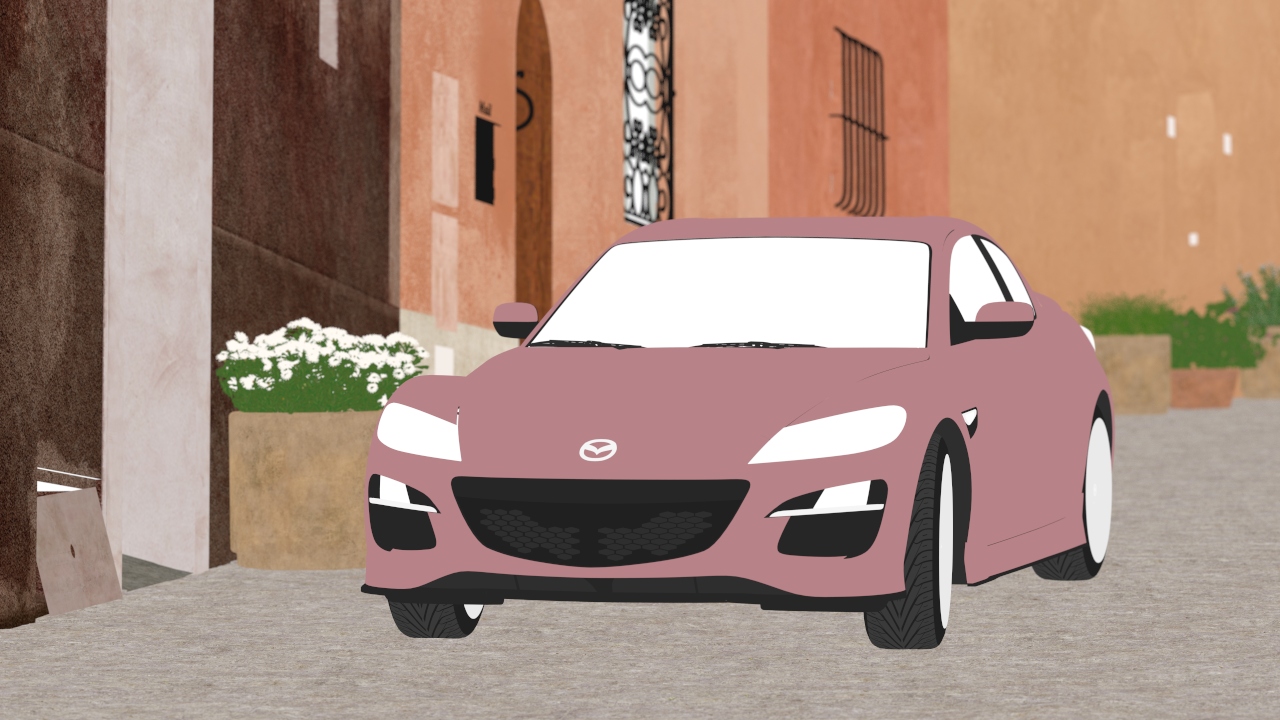
 Example output beauty image denoised using prefiltered auxiliary
feature images (albedo and normal)
too.
Example output beauty image denoised using prefiltered auxiliary
feature images (albedo and normal)
too.
For denoising beauty images, it accepts either a low dynamic range
(LDR) or high dynamic range (HDR) image (color) as the main input
image. In addition to this, it also accepts auxiliary feature images,
albedo and normal, which are optional inputs that usually improve
the denoising quality significantly, preserving more details.
It is possible to denoise auxiliary images as well, in which case only the respective auxiliary image has to be specified as input, instead of the beauty image. This can be done as a prefiltering step to further improve the quality of the denoised beauty image.
The RT filter has certain limitations regarding the supported input
images. Most notably, it cannot denoise images that were not rendered
with ray tracing. Another important limitation is related to
anti-aliasing filters. Most renderers use a high-quality pixel
reconstruction filter instead of a trivial box filter to minimize
aliasing artifacts (e.g. Gaussian, Blackman-Harris). The RT filter
does support such pixel filters but only if implemented with importance
sampling. Weighted pixel sampling (sometimes called splatting)
introduces correlation between neighboring pixels, which causes the
denoising to fail (the noise will not be filtered), thus it is not
supported.
The filter can be created by passing "RT" to the oidnNewFilter
function as the filter type. The filter supports the parameters listed
in the table below. All specified images must have the same dimensions.
The output image can be one of the input images (i.e. in-place denoising
is supported). See section Examples for simple code
snippets that demonstrate the usage of the filter.
| Type | Name | Default | Description |
|---|---|---|---|
Image | color | optional | input beauty image (1–3 channels, LDR values in [0, 1] or HDR values in [0, +∞), values being interpreted such that, after scaling with the inputScale parameter, a value of 1 corresponds to a luminance level of 100 cd/m²) |
Image | albedo | optional | input auxiliary image containing the albedo per pixel (1–3 channels, values in [0, 1]) |
Image | normal | optional | input auxiliary image containing the shading normal per pixel (1–3 channels, world-space or view-space vectors with arbitrary length, values in [-1, 1]) |
Image | output | required | output image (1–3 channels); can be one of the input images |
Bool | hdr | false | the main input image is HDR |
Bool | srgb | false | the main input image is encoded with the sRGB (or 2.2 gamma) curve (LDR only) or is linear; the output will be encoded with the same curve |
Float | inputScale | NaN | scales values in the main input image before filtering, without scaling the output too, which can be used to map color or auxiliary feature values to the expected range, e.g. for mapping HDR values to physical units (which affects the quality of the output but not the range of the output values); if set to NaN, the scale is computed implicitly for HDR images or set to 1 otherwise |
Bool | cleanAux | false | the auxiliary feature (albedo, normal) images are noise-free; recommended for highest quality but should not be enabled for noisy auxiliary images to avoid residual noise |
Int | quality | high | image quality mode as an OIDNQuality value |
Data | weights | optional | trained model weights blob |
Int | maxMemoryMB | -1 | if set to >= 0, a request is made to limit the memory usage below the specified amount in megabytes at the potential cost of slower performance, but actual memory usage may be higher (the target may not be achievable or there may be additional allocations beyond the control of the library); otherwise, memory usage will be limited to an unspecified device-dependent amount; in both cases, filters on the same device share almost all of their allocated memory to minimize total memory usage |
Int | tileAlignment | constant | when manually denoising in tiles, the tile size and offsets should be multiples of this amount of pixels to avoid artifacts; when denoising HDR images inputScale must be set by the user to avoid seam artifacts |
Int | tileOverlap | constant | when manually denoising in tiles, the tiles should overlap by this amount of pixels |
Parameters supported by the RT filter.
Using auxiliary feature images like albedo and normal helps preserving fine details and textures in the image thus can significantly improve denoising quality. These images should typically contain feature values for the first hit (i.e. the surface which is directly visible) per pixel. This works well for most surfaces but does not provide any benefits for reflections and objects visible through transparent surfaces (compared to just using the color as input). However, this issue can be usually fixed by storing feature values for a subsequent hit (i.e. the reflection and/or refraction) instead of the first hit. For example, it usually works well to follow perfect specular (delta) paths and store features for the first diffuse or glossy surface hit instead (e.g. for perfect specular dielectrics and mirrors). This can greatly improve the quality of reflections and transmission. We will describe this approach in more detail in the following subsections.
The auxiliary feature images should be as noise-free as possible. It is
not a strict requirement but too much noise in the feature images may
cause residual noise in the output. Ideally, these should be completely
noise-free. If this is the case, this should be hinted to the filter
using the cleanAux parameter to ensure the highest possible image
quality. But this parameter should be used with care: if enabled, any
noise present in the auxiliary images will end up in the denoised image
as well, as residual noise. Thus, cleanAux should be enabled only if
the auxiliary images are guaranteed to be noise-free.
Usually it is difficult to provide clean feature images, and some
residual noise might be present in the output even with cleanAux being
disabled. To eliminate this noise and to even improve the sharpness of
texture details, the auxiliary images should be first denoised in a
prefiltering step, as mentioned earlier. Then, these denoised auxiliary
images could be used for denoising the beauty image. Since these are now
noise-free, the cleanAux parameter should be enabled. See section
Denoising with prefiltering (C++11
API) for a simple code example.
Prefiltering makes denoising much more expensive but if there are
multiple color AOVs to denoise, the prefiltered auxiliary images can be
reused for denoising multiple AOVs, amortizing the cost of the
prefiltering step.
Thus, for final-frame denoising, where the best possible image quality
is required, it is recommended to prefilter the auxiliary features if
they are noisy and enable the cleanAux parameter. Denoising with noisy
auxiliary features should be reserved for previews and interactive
rendering.
All auxiliary images should use the same pixel reconstruction filter as the beauty image. Using a properly anti-aliased beauty image but aliased albedo or normal images will likely introduce artifacts around edges.
Albedos
The albedo image is the feature image that usually provides the biggest quality improvement. It should contain the approximate color of the surfaces independent of illumination and viewing angle.
 Example albedo image obtained using the first hit. Note that the
albedos of all transparent surfaces are
1.
Example albedo image obtained using the first hit. Note that the
albedos of all transparent surfaces are
1.
 Example albedo image obtained using the first diffuse or glossy
(non-delta) hit. Note that the albedos of perfect specular (delta)
transparent surfaces are computed as the Fresnel blend of the reflected
and transmitted
albedos.
Example albedo image obtained using the first diffuse or glossy
(non-delta) hit. Note that the albedos of perfect specular (delta)
transparent surfaces are computed as the Fresnel blend of the reflected
and transmitted
albedos.
For simple matte surfaces this means using the diffuse color/texture as the albedo. For other, more complex surfaces it is not always obvious what is the best way to compute the albedo, but the denoising filter is flexible to a certain extent and works well with differently computed albedos. Thus it is not necessary to compute the strict, exact albedo values but must be always between 0 and 1.
For metallic surfaces the albedo should be either the reflectivity at normal incidence (e.g. from the artist friendly metallic Fresnel model) or the average reflectivity; or if these are constant (not textured) or unknown, the albedo can be simply 1 as well.
The albedo for dielectric surfaces (e.g. glass) should be either 1 or, if the surface is perfect specular (i.e. has a delta BSDF), the Fresnel blend of the reflected and transmitted albedos. The latter usually works better but only if it does not introduce too much noise or the albedo is prefiltered. If noise is an issue, we recommend to split the path into a reflected and a transmitted path at the first hit, and perhaps fall back to an albedo of 1 for subsequent dielectric hits. The reflected albedo in itself can be used for mirror-like surfaces as well.
The albedo for layered surfaces can be computed as the weighted sum of the albedos of the individual layers. Non-absorbing clear coat layers can be simply ignored (or the albedo of the perfect specular reflection can be used as well) but absorption should be taken into account.
Normals
The normal image should contain the shading normals of the surfaces either in world-space or view-space. It is recommended to include normal maps to preserve as much detail as possible.
 Example normal image obtained using the first hit (the values are
actually in [−1, 1] but were mapped to [0, 1] for illustration
purposes).
Example normal image obtained using the first hit (the values are
actually in [−1, 1] but were mapped to [0, 1] for illustration
purposes).
 Example normal image obtained using the first diffuse or glossy
(non-delta) hit. Note that the normals of perfect specular (delta)
transparent surfaces are computed as the Fresnel blend of the reflected
and transmitted
normals.
Example normal image obtained using the first diffuse or glossy
(non-delta) hit. Note that the normals of perfect specular (delta)
transparent surfaces are computed as the Fresnel blend of the reflected
and transmitted
normals.
Just like any other input image, the normal image should be anti-aliased (i.e. by accumulating the normalized normals per pixel). The final accumulated normals do not have to be normalized but must be in the [-1, 1] range (i.e. normals mapped to [0, 1] are not acceptable and must be remapped to [−1, 1]).
Similar to the albedo, the normal can be stored for either the first or a subsequent hit (if the first hit has a perfect specular/delta BSDF).
Quality
The filter supports setting an image quality mode, which determines whether to favor quality, performance, or have a balanced solution between the two. The supported quality modes are listed in the following table.
| Name | Description |
|---|---|
OIDN_QUALITY_DEFAULT | default quality |
OIDN_QUALITY_FAST | high performance (for interactive/real-time preview rendering) |
OIDN_QUALITY_BALANCED | balanced quality/performance (for interactive/real-time rendering) |
OIDN_QUALITY_HIGH | high quality (for final-frame rendering); default |
Supported image quality modes, i.e., valid constants of type
OIDNQuality.
By default, filtering is performed in high quality mode, which is recommended for final-frame rendering. Using this setting the results have the same high quality regardless of what kind of device (CPU or GPU) is used. However, due to significant hardware architecture differences between devices, there might be small numerical differences between the produced outputs.
The balanced quality mode may provide somewhat lower image quality but higher performance and lower default memory usage, and is thus recommended for interactive and real-time rendering. For even higher performance and lower memory usage, a fast quality mode is also available but has noticeably lower image quality, making it suitable mainly for fast previews. Note that in the balanced and fast quality modes larger numerical differences should be expected across devices compared to the high quality mode.
The difference in quality and performance between quality modes depends
on the combination of input features, parameters (e.g. cleanAux), and
the device architecture. In some cases the difference may be small or
even none.
Weights
Instead of using the built-in trained models for filtering, it is also possible to specify user-trained models at runtime. This can be achieved by passing the model weights blob corresponding to the specified set of features and other filter parameters, produced by the included training tool. See Section Training for details.
RTLightmap
The RTLightmap filter is a variant of the RT filter optimized for
denoising HDR and normalized directional (e.g. spherical harmonics)
lightmaps. It does not support LDR images.
The filter can be created by passing "RTLightmap" to the
oidnNewFilter function as the filter type. The filter supports the
following parameters:
| Type | Name | Default | Description |
|---|---|---|---|
Image | color | required | input beauty image (1–3 channels, HDR values in [0, +∞), interpreted such that, after scaling with the inputScale parameter, a value of 1 corresponds to a luminance level of 100 cd/m²; directional values in [-1, 1]) |
Image | output | required | output image (1–3 channels); can be one of the input images |
Bool | directional | false | whether the input contains normalized coefficients (in [-1, 1]) of a directional lightmap (e.g. normalized L1 or higher spherical harmonics band with the L0 band divided out); if the range of the coefficients is different from [-1, 1], the inputScale parameter can be used to adjust the range without changing the stored values |
Float | inputScale | NaN | scales input color values before filtering, without scaling the output too, which can be used to map color values to the expected range, e.g. for mapping HDR values to physical units (which affects the quality of the output but not the range of the output values); if set to NaN, the scale is computed implicitly for HDR images or set to 1 otherwise |
Int | quality | high | image quality mode as an OIDNQuality value |
Data | weights | optional | trained model weights blob |
Int | maxMemoryMB | -1 | if set to >= 0, a request is made to limit the memory usage below the specified amount in megabytes at the potential cost of slower performance, but actual memory usage may be higher (the target may not be achievable or there may be additional allocations beyond the control of the library); otherwise, memory usage will be limited to an unspecified device-dependent amount; in both cases, filters on the same device share almost all of their allocated memory to minimize total memory usage |
Int | tileAlignment | constant | when manually denoising in tiles, the tile size and offsets should be multiples of this amount of pixels to avoid artifacts; when denoising HDR images inputScale must be set by the user to avoid seam artifacts |
Int | tileOverlap | constant | when manually denoising in tiles, the tiles should overlap by this amount of pixels |
Parameters supported by the RTLightmap filter.
Examples
Intel Open Image Denoise ships with a couple of simple example applications.
oidnDenoise
oidnDenoise is a minimal working example demonstrating how to use
Intel Open Image Denoise, which can be found at apps/oidnDenoise.cpp.
It uses the C++11 convenience wrappers of the C99 API.
This example is a simple command-line application that denoises the provided image, which can optionally have auxiliary feature images as well (e.g. albedo and normal). By default the images must be stored in the Portable FloatMap (PFM) format, and the color values must be encoded in little-endian format. To enable other image formats (e.g. OpenEXR, PNG) as well, the project has to be rebuilt with OpenImageIO support enabled.
Running oidnDenoise without any arguments or the -h argument will
bring up a list of command-line options.
oidnBenchmark
oidnBenchmark is a basic command-line benchmarking application for
measuring denoising speed, which can be found at
apps/oidnBenchmark.cpp.
Running oidnBenchmark with the -h argument will bring up a list of
command-line options.
Training
The Intel Open Image Denoise source distribution includes a Python-based
neural network training toolkit (located in the training directory),
which can be used to train the denoising filter models with image
datasets provided by the user. This is an advanced feature of the
library which usage requires some background knowledge of machine
learning and basic familiarity with deep learning frameworks and
toolkits (e.g. PyTorch or TensorFlow, TensorBoard).
The training toolkit consists of the following command-line scripts:
-
preprocess.py: Preprocesses training and validation datasets. -
train.py: Trains a model using preprocessed datasets. -
infer.py: Performs inference on a dataset using the specified training result. -
export.py: Exports a training result to the runtime model weights format. -
find_lr.py: Tool for finding the optimal minimum and maximum learning rates. -
visualize.py: Invokes TensorBoard for visualizing statistics of a training result. -
split_exr.py: Splits a multi-channel EXR image into multiple feature images. -
convert_image.py: Converts a feature image to a different image format. -
compare_image.py: Compares two feature images using the specified quality metrics.
Prerequisites
Before you can run the training toolkit you need the following prerequisites:
-
Linux (other operating systems are currently not supported)
-
Python 3.7 or later
-
PyTorch 2.4 or later
-
NumPy 1.19 or later
-
OpenImageIO 2.1 or later
-
TensorBoard 2.4 or later
Devices
Most scripts in the training toolkit support selecting what kind of
device (e.g. CPU, GPU) to use for the computations (--device or -d
option). If multiple devices of the same kind are available
(e.g. multiple GPUs), the user can specify which one of these to use
(--device_id or -k option). Additionally, some scripts, like
train.py, support data-parallel execution on multiple devices for
faster performance (--num_devices or -n option).
Datasets
A dataset should consist of a collection of noisy and corresponding noise-free reference images. It is possible to have more than one noisy version of the same image in the dataset, e.g. rendered at different samples per pixel and/or using different seeds.
The training toolkit expects to have all datasets (e.g. training,
validation) in the same parent directory (e.g. data). Each dataset is
stored in its own subdirectory (e.g. train, valid), which can have
an arbitrary name.
The images must be stored in OpenEXR format
(.exr files), and the filenames must have a specific format but the
files can be stored in an arbitrary directory structure inside the
dataset directory. The only restriction is that all versions of an image
(noisy images and the reference image) must be located in the same
subdirectory. Each feature of an image (e.g. color, albedo) must be
stored in a separate image file, i.e. multi-channel EXR image files are
not supported. If you have multi-channel EXRs, you can split them into
separate images per feature using the included split_exr.py tool.
An image filename must consist of a base name, a suffix with the number
of samples per pixel or whether it is the reference image
(e.g. _0128spp, _ref), the feature type extension (e.g. .hdr,
.alb), and the image format extension (.exr). The exact filename
format as a regular expression is the following:
.+_([0-9]+(spp)?|ref|reference|gt|target)\.(hdr|ldr|sh1[xyz]|alb|nrm)\.exr
The number of samples per pixel should be padded with leading zeros to have a fixed number of digits. If the reference image is not explicitly named as such (i.e. has the number of samples instead), the image with the most samples per pixel will be considered the reference.
The following image features are supported:
| Feature | Description | Channels | File extension |
|---|---|---|---|
hdr | color (HDR) | 3 | .hdr.exr |
ldr | color (LDR) | 3 | .ldr.exr |
sh1 | color (normalized L1 spherical harmonics) | 3 × 3 images | .sh1x.exr, .sh1y.exr, .sh1z.exr |
alb | albedo | 3 | .alb.exr |
nrm | normal | 3 | .nrm.exr |
Image features supported by the training toolkit.
The following directory tree demonstrates an example root dataset
directory (data) containing one dataset (rt_train) with HDR color
and albedo feature images:
data
`-- rt_train
|-- scene1
| |-- view1_0001.alb.exr
| |-- view1_0001.hdr.exr
| |-- view1_0004.alb.exr
| |-- view1_0004.hdr.exr
| |-- view1_8192.alb.exr
| |-- view1_8192.hdr.exr
| |-- view2_0001.alb.exr
| |-- view2_0001.hdr.exr
| |-- view2_8192.alb.exr
| `-- view2_8192.hdr.exr
|-- scene2_000008spp.alb.exr
|-- scene2_000008spp.hdr.exr
|-- scene2_000064spp.alb.exr
|-- scene2_000064spp.hdr.exr
|-- scene2_reference.alb.exr
`-- scene2_reference.hdr.exr
Preprocessing (preprocess.py)
Training and validation datasets can be used only after preprocessing
them using the preprocess.py script. This will convert the specified
training (--train_data or -t option) and validation datasets
(--valid_data or -v option) located in the root dataset directory
(--data_dir or -D option) to a format that can be loaded more
efficiently during training. All preprocessed datasets will be stored in
a root preprocessed dataset directory (--preproc_dir or -P option).
The preprocessing script requires the set of image features to include in the preprocessed dataset as command-line arguments. Only these specified features will be available for training but it is not required to use all of them at the same time. Thus, a single preprocessed dataset can be reused for training multiple models with different combinations of the preprocessed features.
By default, all input features are assumed to be noisy, including the
auxiliary features (e.g. albedo, normal), each having versions at
different samples per pixel. It is also possible to train with
noise-free auxiliary features, in which case the reference auxiliary
features are used instead of the various noisy ones (--clean_aux
option). This improves quality significantly if the auxiliary features
used for inference will be either originally noise-free or prefiltered
with separately trained auxiliary feature denoising models. If inference
will be done only with prefiltered features, even higher quality can be
achieved by training with prefiltered features instead of the reference
onces. This can be achieved by first training the auxiliary feature
models and then specifying the list of these results when preprocessing
the dataset for the main feature (--aux_results or -a option).
Preprocessing also depends on the filter that will be trained
(e.g. determines which HDR/LDR transfer function has to be used), which
should be also specified (--filter or -f option). The alternative is
to manually specify the transfer function (--transfer or -x option)
and other filter-specific parameters, which could be useful for training
custom filters.
For example, to preprocess the training and validation datasets
(rt_train and rt_valid) with HDR color, albedo, and normal image
features, for training the RT filter, the following command can be
used:
./preprocess.py hdr alb nrm --filter RT --train_data rt_train --valid_data rt_valid
It is possible to preprocess the same dataset multiple times, with possibly different combinations of features and options. The training script will use the most suitable and most recent preprocessed version depending on the training parameters.
For more details about using the preprocessing script, including other options, please have a look at the help message:
./preprocess.py -h
Training (train.py)
The filters require separate trained models for each supported combination of input features. Thus, depending on which combinations of features the user wants to support for a particular filter, one or more models have to be trained.
After preprocessing the datasets, it is possible to start training a
model using the train.py script. Similar to the preprocessing script,
the input features must be specified (could be a subset of the
preprocessed features), and the dataset names, directory paths, and the
filter can be also passed. If the --clean_aux or --aux_results
options were specified for preprocessing, these must be passed
identically to the training script as well.
Open Image Denoise uses models of different sizes for different quality
modes (high, balanced, fast). Specifying the quality mode (--quality
or -q option) will cause the model to be implicitly selected, or the
model can be specified explicitly as well (--model or -m option).
The tool will produce a training result, the name of which can be
either specified (--result or -r option) or automatically generated
(by default). Each result is stored in its own subdirectory, and these
are located in a common parent directory (--results_dir or -R
option). If a training result already exists, the tool will resume
training that result from the latest checkpoint.
The default training hyperparameters should work reasonably well in
general, but some adjustments might be necessary for certain datasets to
attain optimal performance, most importantly: the number of epochs
(--num_epochs or -e option), the global mini-batch size
(--batch_size or -b option), and the learning rate. The training
tool uses a one-cycle learning rate schedule with cosine annealing,
which can be configured by setting the base learning rate
(--learning_rate or --lr option), the maximum learning rate
(--max_learning_rate or --max_lr option), and the percentage of the
cycle spent increasing the learning rate (--learning_rate_warmup or
--lr_warmup option).
Example usage:
./train.py hdr alb --filter RT --train_data rt_train --valid_data rt_valid --result rt_hdr_alb
For finding the optimal learning rate range, we recommend using the
included find_lr.py script, which trains one epoch using an increasing
learning rate and logs the resulting losses in a comma-separated values
(CSV) file. Plotting the loss curve can show when the model starts to
learn (the base learning rate) and when it starts to diverge (the
maximum learning rate).
The model is evaluated with the validation dataset at regular intervals
(--num_valid_epochs option), and checkpoints are also regularly
created (--num_save_epochs option) to save training progress. Also,
some statistics are logged (e.g. training and validation losses,
learning rate) per epoch, which can be later visualized with TensorBoard
by running the visualize.py script, e.g.:
./visualize.py --result rt_hdr_alb
Training is performed with mixed precision (FP16 and FP32) by default,
if it supported by the hardware, which makes training faster and use
less memory. However, in some rare cases this might cause some
convergence issues. The training precision can be manually set to FP32
if necessary (--precision or -p option).
Inference (infer.py)
A training result can be tested by performing inference on an image
dataset (--input_data or -i option) using the infer.py script. The
dataset does not have to be preprocessed. In addition to the result to
use, it is possible to specify which checkpoint to load as well (-e or
--num_epochs option). By default the latest checkpoint is loaded.
The tool saves the output images in a separate directory (--output_dir
or -O option) in the requested formats (--format or -F option). It
also evaluates a set of image quality metrics (--metric or -M
option), e.g. PSNR, SSIM, for images that have reference images
available. All metrics are computed in tonemapped non-linear sRGB space.
Thus, HDR images are first tonemapped (with Naughty Dog’s Filmic
Tonemapper from John Hable’s Uncharted 2: HDR Lighting presentation)
and converted to sRGB before evaluating the metrics.
Example usage:
./infer.py --result rt_hdr_alb --input_data rt_test --format exr png --metric ssim
The inference tool supports prefiltering of auxiliary features as well,
which can be performed by specifying the list of training results for
each feature to prefilter (--aux_results or -a option).
Exporting Results (export.py)
The training result produced by the train.py script cannot be
immediately used by the main library. It has to be first exported to the
runtime model weights format, a Tensor Archive (TZA) file. Running the
export.py script for a training result (and optionally a checkpoint
epoch) will create a binary .tza file in the directory of the result,
which can be either used at runtime through the API or it can be
included in the library build by replacing one of the built-in weights
files.
Example usage:
./export.py --result rt_hdr_alb
Image Conversion and Comparison
In addition to the already mentioned split_exr.py script, the toolkit
contains a few other image utilities as well.
convert_image.py converts a feature image to a different image format
(and/or a different feature, e.g. HDR color to LDR), performing
tonemapping and other transforms as well if needed. For HDR images the
exposure can be adjusted by passing a linear exposure scale
(--exposure or -E option). Example usage:
./convert_image.py view1_0004.hdr.exr view1_0004.png --exposure 2.5
The compare_image.py script compares two feature images (preferably
having the dataset filename format to correctly detect the feature)
using the specified image quality metrics, similar to the infer.py
tool. Example usage:
./compare_image.py view1_0004.hdr.exr view1_8192.hdr.exr --exposure 2.5 --metric mse ssim