Awesome
Seamless Satellite-image Synthesis
by Jialin Zhu and Tom Kelly.
Project site and additional material. The code of our models borrows heavily from the BicycleGAN repository and SPADE repository. Some missing description can be found in the original repository.
(If you are not a programmer or you do not understand Deep Learning, I suggest you read my reply in this issue. This is a project to show our research results, not an engineering project that can be directly used or simply modified to generate infinite satellite images. Just think about it briefly: due to copyright restrictions, I cannot provide a large amount of map data. You need to go to Digimap to download vector map data and render it to map image yourself. This is enough hard for many people.
Web UI system
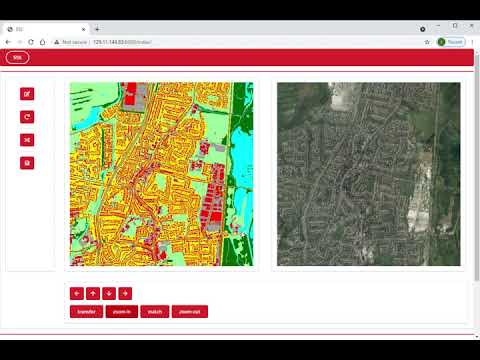
- The UI system is developed by web framework - Django.
- Clone the code and
cd web_ui - Install required packages(mainly Django 3.1 and PyTorch 1.7.1)
- These are easy to install so we do not provide a
requirements.txtfile. - Packages other than Django and PyTorch can be installed in sequence according to the output error logs.
- These are easy to install so we do not provide a
- Download pre-trained weights and put them in
web_ui/sss_ui/checkpoints. - Run
python manage.py migrateandpython manage.py makemigrations. - Run
python runserver.py. - Access
127.0.0.1/indexthourough a web browser. - Start play with the UI system
Pre-trained weights are available here: Mega link
We provide some preset map data, if you want more extensive or other map data, you need to replace the map data yourself. There are some features that have not yet been implemented. Please report bugs as github issues.
SSS pipeline
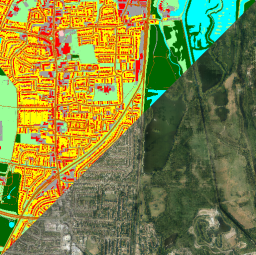
The SSS whole pipeline will allow users to generate a set of satellite images from map data of three different scale level.
- Clone the code and
cd SPADE. - Install required packages(mainly PyTorch 1.7.1)
- Run
bash scit_m.sh [level_1_dataset_dir] [raw_data_dir] [results_output_dir]. - The generated satellite images are in the
[results_output_path]folder.
We provide some preset map data, if you want more extensive or other map data, you need to replace the map data yourself.
Training
You can also re-train the whole pipeline or train with your own data. For copyright reasons, we will not provide download links for the data we use. But they are very easy to obtain, especially for academic institutions such as universities. Our training data is from Digimap. We use OS MasterMap® Topography Layer with GDAL and GeoPandas to render map images, and we use satellite images from Aerial via Getmapping.
To train map2sat for level 1:
- Clone the code and
cd SPADE. - Run
python train.py --name [z1] --dataset_mode ins --label_dir [label_dir] --image_dir [image_dir] --instance_dir [instance_dir] --label_nc 13 --load_size 256 --crop_size 256 --niter_decay 20 --use_vae --ins_edge --gpu_ids 0,1,2,3 --batchSize 16. - We recommend using a larger batch size so that the encoder can generate results with greater style differences.
To train map2sat for level z (z > 1):
- Clone the code and
cd SPADE. - Run
python trainCG.py --name [z2_cg] --dataset_mode insgb --label_dir [label_dir] --image_dir [image_dir] --instance_dir [instance_dir] --label_nc 13 --load_size 256 --crop_size 256 --niter_decay 20 --ins_edge --cg --netG spadebranchn --cg_size 256 --gbk_size 8.
To train seam2cont:
- Clone the code and
cd BicycleGAN. - Run
python train.py --dataroot [dataset_dir] --name [z1sn] --model sn --direction AtoB --load_size 256 --save_epoch_freq 201 --lambda_ml 0 --input_nc 8 --dataset_mode sn --seams_map --batch_size 1 --ndf 32 --conD --forced_mask.
Citation
@inproceedings{zhu2021seamless,
title={Seamless Satellite-image Synthesis},
author={Zhu, J and Kelly, T},
booktitle={Computer Graphics Forum},
year={2021},
organization={Wiley}
}
Acknowledgements
We would like to thank Nvidia Corporation for hardware and Ordnance Survey Mapping for map data which made this project possible. This work was undertaken on ARC4, part of the High Performance Computing facilities at the University of Leeds, UK. This work made use of the facilities of the N8 Centre of Excellence in Computationally Intensive Research (N8 CIR) provided and funded by the N8 research partnership and EPSRC (Grant No. EP/T022167/1).