Awesome
ESVO: Event-based Stereo Visual Odometry
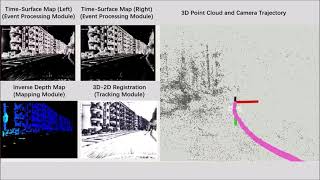
ESVO is a novel pipeline for real-time visual odometry using a stereo event-based camera. Both the proposed mapping and tracking methods leverage a unified event representation (Time Surfaces), thus, it could be regarded as a ''direct'', geometric method using raw event as input.
Please refer to the ESVO Project Page for more detailed information and for testing event data.
Videos

Related Publications
-
Event-based Stereo Visual Odometry, Yi Zhou, Guillermo Gallego, Shaojie Shen, IEEE Transactions on Robotics (T-RO) 2021.
-
Semi-dense 3D Reconstruction with a Stereo Event Camera, Yi Zhou, Guillermo Gallego, Henri Rebecq, Laurent Kneip, Hongdong Li, Davide Scaramuzza, ECCV 2018.
1. Installation
We have tested ESVO on machines with the following configurations
- Ubuntu 18.04.5 LTS + ROS melodic + gcc 5.5.0 + cmake (>=3.10) + OpenCV 3.2
- Ubuntu 16.04 LTS + ROS kinetic + gcc 5.4.0 + cmake (>=3.10) + OpenCV 3.2
- Ubuntu 20.04 LTS + ROS Noetic + OpenCV 4
For Ubuntu 16.04, you may need to upgrade your cmake.
1.1 Driver Installation
To work with event cameras, especially for the Dynamic Vision Sensors (DVS/DAVIS), you need to install some drivers. Please follow the instructions (steps 1-9) at rpg_dvs_ros before moving on to the next step. Note that you need to replace the name of the ROS distribution with the one installed on your computer.
We use catkin tools to build the code. You should have it installed during the driver installation.
1.2 Dependencies Installation
You should have created a catkin workspace in Section 1.1. If not, please go back and create one.
Clone this repository into the src folder of your catkin workspace.
$ cd ~/catkin_ws/src
$ git clone https://github.com/HKUST-Aerial-Robotics/ESVO.git
Dependencies are specified in the file dependencies.yaml. They can be installed with the following commands from the src folder of your catkin workspace:
$ cd ~/catkin_ws/src
$ sudo apt-get install python3-vcstool
$ vcs-import < ESVO/dependencies.yaml
The previous command should clone the the repositories into folders called catkin_simple, glog_catkin, gflags_catkin, minkindr, etc. inside the src folder of your catking workspace, at the same level as this repository (ESVO).
You may need autoreconf to compile glog_catkin. To install autoreconf, run
$ sudo apt-get install autoconf
Note that above command may change on different version of Ubuntu. Please refer to https://askubuntu.com/a/269423 for details.
yaml-cpp is only used for loading calibration parameters from yaml files:
$ cd ~/catkin_ws/src
$ git clone https://github.com/jbeder/yaml-cpp.git
$ cd yaml-cpp
$ mkdir build && cd build && cmake -DYAML_BUILD_SHARED_LIBS=ON ..
$ make -j
Other ROS dependencies should have been installed in Section 1.1.
If not by accident, install the missing ones accordingly.
Besides, you also need to have OpenCV (3.2 or later) and Eigen 3 installed.
1.3 ESVO Installation
After cloning this repository, as stated above (reminder)
$ cd ~/catkin_ws/src
$ git clone https://github.com/HKUST-Aerial-Robotics/ESVO.git
run
$ catkin build esvo_time_surface esvo_core
$ source ~/catkin_ws/devel/setup.bash
2. Usage
To run the pipeline, you need to download rosbag files from the ESVO Project Page.
2.1 esvo_time_surface
This package implements a node that constantly updates the stereo time maps (i.e., time surfaces). To launch it independently, open a terminal and run the command:
$ roslaunch esvo_time_surface stereo_time_surface.launch
To play a bag file, go to esvo_time_surface/launch/rosbag_launcher and modify the path in
[bag_name].launch according to where your rosbag file is downloaded. Then execute
$ roslaunch esvo_time_surface [bag_name].launch
2.2 esvo_core
This package implements the proposed mapping and tracking methods. The initialization is implemented inside the mapping part. To launch the system, run
$ roslaunch esvo_core system_xxx.launch
This will launch two esvo_time_surface nodes (for left and right event cameras, respectively), the mapping node and the tracking node simultaneously. Then play the input (already downloaded) bag file by running
$ roslaunch esvo_time_surface [bag_name].launch
To save trajectories at anytime, go to another terminal and terminate the system by
$ rosparam set /ESVO_SYSTEM_STATUS "TERMINATE"
You need to set the path in /cfg/tracking_xxx.yaml to which the result file will be saved.
2.3 esvo_core/mvstereo
This module implements the mapper of ESVO and some other event-based mapping methods (e.g. [26], [45]). As a multi-view stereo (MVS) pipeline, it assumes that poses are known as prior. To launch the mapper, run
$ roslaunch esvo_core mvstereo_xxx.launch
This will launch two esvo_time_surface nodes (for left and right event cameras, respectively), and the mapping node simultaneously. Then play the input (already downloaded) bag file by running
$ roslaunch esvo_time_surface [bag_name].launch
Note that only rpg and upenn datasets are applicable for this module because they come with the ground truth poses.
3. Parameters (Dynamic Reconfigure)
Time Surface
use_sim_time: SetTruefor all offline experiments, which use simulation time.ignore_polarity: SetTruebecause polarity information is not used in the proposed methods.time_surface_mode: Time surface rendering manner (0: Backward; 1: Forward). 0 indicates to use the standard way to refresh the time surface. Please refer to the implementation for more details.decay_ms: The constant exponential decay parameter (unit: ms).median_blur_kernel_size: Determines the size of the kernel for denoising the time surface.max_event_queue_len: Determines the length of the event queue maintained at each coordinate.
Mapping
Event Matching
EM_Slice_Thickness: Determines the thickness of the temporal slice (unit: sec).EM_Time_THRESHOLD: Temporal simultaneity threshold.EM_EPIPOLAR_THRESHOLD: Epipolar constraint threshold.EM_TS_NCC_THRESHOLD: Motion consistency threshold.EM_NUM_EVENT_MATCHING: Maximum number of events for event matching.
Block Matching
BM_half_slice_thickness: Determines the thickness of the temporal slice (unit: sec).BM_min_disparity: Minimum searching distance for epipolar matching.BM_max_disparity: Maximum searching distance for epipolar matching.BM_step: Epipolar searching interval.BM_ZNCC_Threshold: ZNCC-based matching threshold.BM_bUpDownConfiguration: A flag that indicates the direction of the stereo baseline (True: up-down; False: left-right).bSmoothTimeSurface: To smooth the time surfaces or not.
Non-linear Optimization parameters
invDepth_min_range: Lower bound for the resulting inverse depth.invDepth_max_range: Upper bound for the resulting inverse depth.residual_vis_threshold: Threshold on the temporal residual of the inverse depth estimates.stdVar_vis_threshold: Threshold on the uncertainty of the inverse depth estimates.age_vis_threshold: Threshold on the number of fusion operations (inverse depth estimates).age_max_range: Upper bound for the age (used for visualization only).fusion_radius: Determines the number of pixels that are involved in the depth fusion.FUSION_STRATEGY: Fusion strategy. (use CONST_FRAMES or CONST_POINTS)maxNumFusionFrames: Determines how many frames (observations) are fused to the current time. (used in CONST_FRAMES mode)maxNumFusionPoints: Determines how many points are fused to the current time. (used in CONST_POINTS mode)Denoising: This operation helps to denoise events that are induced by reflection of VICON. SetTrueto use.Regularization: Perform regularization on the resulting inverse depth map.PROCESS_EVENT_NUM: Maximum number of depth estimates performed at every observation.TS_HISTORY_LENGTH: The number of time surfaces maintained.INIT_SGM_DP_NUM_THRESHOLD: Minimum number of depth points needed from SGM-based initialization.mapping_rate_hz: Updating rate of the mapping node.patch_size_X: Size of patches on the time surface (x dimension).patch_size_Y: Size of patches on the time surface (y dimension).LSnorm: Least squares method choice (use l2 or Tdist).Tdist_nu: Parameter of the applied Student's t distribution.Tdist_scale: Parameter of the applied Student's t distribution.Tdist_stdvar: Parameter of the applied Student's t distribution.bVisualizeGlobalPC: SetTrueto visualize global pointcloud.visualizeGPC_interval: Time interval to push new points to global pointcloud.NumGPC_added_oper_refresh: Number of points pushed to global pointcloud.
Tracking
invDepth_min_range: Lower bound for the depth of input pointcoud. (Used for visualization only).invDepth_max_range: Upper bound for the depth of input pointcoud. (Used for visualization only).TS_HISTORY_LENGTH: The number of time surfaces maintained.REF_HISTORY_LENGTH: The number of reference local maps maintained.tracking_rate_hz: Updating rate of the tracking node.patch_size_X: Size of patches on the time surface (x dimension).patch_size_Y: Size of patches on the time surface (y dimension).kernelSize: Kernel size for smoothing the negative time surface.MAX_REGISTRATION_POINTS: Maximum number of 3D points that are involved in the 3D-2D registration.BATCH_SIZE: Number of 3D points used in each iteration.MAX_ITERATION: Maximum number of iterations.LSnorm: Choice of Least-squares method. (use Huber or l2)huber_threshold: Huber norm parameter.MIN_NUM_EVENTS: Threshold on the number of events occurred since the last observation. This one is used to check if enough stimuli are perceived by the event camera.RegProblemType: Jacobian computation manner (0numerical;1analytical).SAVE_TRAJECTORY: SetTrueto save trajectory.SEQUENCE_NAME: Assign it when saving the trajectory.VISUALIZE_TRAJECTORY: SetTrueto visualize path.
4. Notes for Good Results
Real-time performance is witnessed on a Razor Blade 15 laptop (Intel® Core™ i7-8750H CPU @ 2.20GHz × 12).
-
To get real-time performance, you need a powerful PC with modern CPUs which supports at least 6 threads. Remember to keep you computer cool!
-
The mapping and tracking are loosely coupled, which indicates that the failure of anyone will lead to bad results of the other, and hence of the whole system.
-
If the initialization does not look reasonably good, reset the system by clicking the checkbox
resetButtonin the dynamic reconfigure. This checker box is used as a button. Sorry for the bad GUI design. -
If you use a PC with limited computational resources, you could slow down the playback of the rosbag by a factor, e.g.
$ rosbag play xxx.bag -r 0.5 --clock
and modify the rate of the external clock (usd for synchronizing the stereo time surfaces) accordingly, e.g.
`<node name="global_timer" pkg="rostopic" type="rostopic" args="pub -s -r 50 /sync std_msgs/Time 'now' ">`
In this example, the bag file is played at a factor of 0.5, and thus, the synchronization signal is set to 50 Hz accordingly. These modifications must be made accordingly such that the time surface is updated (refreshed) at 100 Hz in simulation time. You can check this by running,
$ rostopic hz /TS_left
$ rostopic hz /TS_right
They are both supposed to be approximately 100 Hz.
- The
esvo_coreis implemented using hyper-thread techniques. Please modify the number of threads used for mapping and tracking according to your PC's capability. The parameters can be found ininclude/esvo_core/tools/utils.h. - The
esvo_time_surfacesupports hyper-thread computation. We find this may be necessary when to deal with sensors with higher resolution than that of a DAVIS346 (346 x 260). The single thread implementation takes <= 5 ms on DAVIS240C (240 x 180) and <= 10 ms on DAVIS346 (346 x 260). We have evaluated the double-thread version on the mentioned PC platform, which gives <= 3 ms on 240 x 180 resolution and <= 6 ms on <= 346 x 260 resolution. - Note that ESVO is non-deterministic, namely results may be different each time you run it on the same rosbag file. This is due to stochastic operations involved in the tracking, and also, the parallelism of the system. The performance differs according to the condition of your PC, e.g. you will get better efficiency if you turn off all other running programmes.
5. Datasets
The event data fed to ESVO needs to be recorded at remarkbly higher streaming rate than that in the default configuration (30 Hz) of the rpg_dvs_ros driver. This is due to the fact that the esvo_time_surface operates at 100 Hz. To refresh the time surfaces with the most current events to the utmost, a notably higher streaming rate is needed (e.g., 1000 Hz). The streaming rate can be either simply set in the hardware or modified via rewriting the bag. We provide a naive example in /rosbag_editor to show how.
For convenience we provide a number of bag files, which have been rewritten to meet above requirement. They can be downloaded from the ESVO Project Page.
6. License
ESVO is licensed under the GNU General Public License Version 3 (GPLv3), see http://www.gnu.org/licenses/gpl.html.
For commercial use, please contact Yi Zhou and Shaojie Shen.
Email addresses are available in the project page.
7. Log
- 12/01/2021 Merge with Suman Ghosh's pull request. This commit fixed the running issue on machines with Ubuntu 20.04 + ROS Noetic + OpenCV 4.
- 28/01/2021 We provide the independent mapping module of ESVO.
This module maybe useful for people who are interested in event-based multi-view stereo (MVS) methods,
which typically assume poses are known as prior knowledge.
Besides, methods in [26], [45] are also implemented for comparison purpose.
Please refer to
2.3 esvo_core/mvstereo. - 23/02/2021 ESVO was integrated into the modular iniVation DV software platform. It runs at up to 200 fps on Jetson TX2, and is fully open-source. Download here: https://lnkd.in/deuRKSK.