Awesome
MMM-Navigate
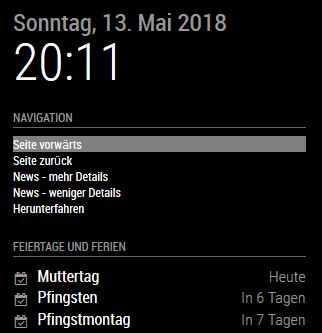
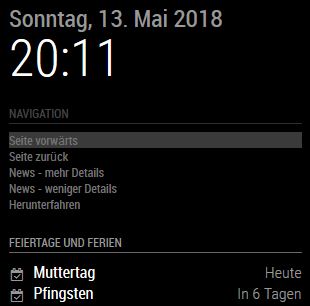
A module to connect a rotary encoder to MagicMirror and use it for Navigation inside of MagicMirror I wanted to use interaction to the MagicMirror and decided to use a rotary encoder, which has 3 functions: Clockwise, Counterclockwise and Press. These functions where combined to a navigation, so you have some possibilities, f.e.: Page increment/decrement, Newsfeed Article more/less details and actions for notification system. The navigation fades out, if not used.
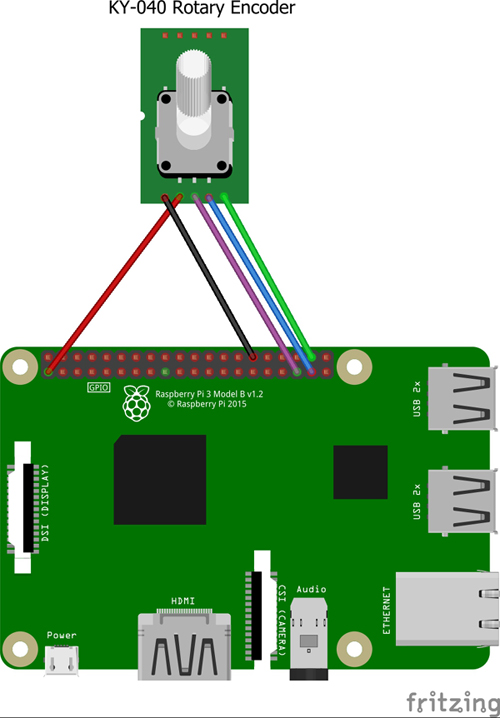
Connect rotary encoder to raspberry pi
Using capacitors for CLK, DT and SW Pin can be useful for debouncing.
Installing the module
Clone this repository in your ~/MagicMirror/modules/ folder ( $ cd ~MagicMirror/modules/ ):
git clone https://github.com/Ax-LED/MMM-Navigate
cd MMM-Navigate
npm install # this can take a while
Using the module
To use this module, add it to the modules array in the config/config.js file:
{
module: "MMM-Navigate",
header: "Navigation",
position: "top_left",
config: {
Alias: [
'Seiten blättern',
'News (mehr/weniger Details)',
'Test notification',
'News - mehr Details',
'News - weniger Details',
'Neustart MagicMirror (PM2)',
'Neustart',
'Herunterfahren'
],
Action: [
[{notification:'PAGE_INCREMENT',payload:''},{notification:'PAGE_DECREMENT',payload:''}],//action array, first press locks menu, after this rotation CW/CCW executes, second press release lock mode
[{notification:'ARTICLE_MORE_DETAILS',payload:''},{notification:'ARTICLE_LESS_DETAILS',payload:''}],
{notification: 'SHOW_ALERT', payload: {type:'notification',message:'Dies ist eine Testnachricht'}},//single action, execute on press
{notification:'ARTICLE_MORE_DETAILS',payload:''},
{notification:'ARTICLE_LESS_DETAILS',payload:''},
{notification: 'SHELLCOMMAND', payload:'pm2 restart mm'},
{notification: 'SHELLCOMMAND', payload:'sudo reboot'},
{notification: 'SHELLCOMMAND', payload:'sudo shutdown -h now'}
],
GPIOPins: [26,20,19]//rotary cw, rotary ccw, rotary press (BCM Numbering)
},
},
On some Raspberry Pis it is neccesary to put the following line to /boot/config.txt for the GPIO where "rotary press (SW)" is connected:
gpio=19=ip,pu
<b>Background:</b> Sets your GPIO 19 as input (ip) and pull up (pu) Change the entry according to the GPIO pin you use.
Configuration options
The following properties can be configured:
<table width="100%"> <thead> <tr> <th>Option</th> <th width="100%">Description</th> </tr> </thead> <tbody> <tr> <td><code>Alias</code></td> <td>An Array of the Alias for the navigation entries.</td> </tr> <tr> <td><code>Action</code></td> <td>An Array of Action of the Alias. There are two modes:<br>1. Execution of a single action, for Example <code>{notification:'PAGE_INCREMENT',payload:''}</code> to send page increment to MMM-Pages Module.<br> 2. Execution of an array of action, as there are some actions, which belong together (like PAGE_INCREMENT and PAGE_DECREMENT), Example Config: <code>[{notification:'PAGE_INCREMENT',payload:''},{notification:'PAGE_DECREMENT',payload:''}]</code><br> Behavior: First press locks menu (can be identified by the red css frame), after this rotation CW/CCW executes actions from config, second press release lock mode so you can select another navigation entry.</td> </tr> <tr> <td><code>GPIOPins</code></td> <td>Array for Definition of GPIO-Pins (BMC) to connect the rotary encoder for the following actions: Clockwise, Counterclockwise and Press</td> </tr> <tr> <td><code>SHELLCOMMAND</code></td> <td>Executes code in a terminal of you pi, so you can do almost everything you want. Example you want to shutdown your pi; Config: <code> {notification: 'SHELLCOMMAND', payload:'sudo shutdown -h now'}</code><br> </td> </tr> </table> Further information:<br>In version 1.1 of the module, i added a 'second click confirmation notification' for the following <code>SHELLCOMMAND</code>.<br> This means, if you are using SHELLCOMMAND and press the rotary, you get a notification to do a second press to execute the selected entry.Further options
You can communicate with this module also by sending notifications. Examples:<br> <code>yourmmip:8080/MMM-Navigate/remote?action=NOTIFICATION¬ification=CCW</code> emulates turning rotary counterclockwise<br> <code>yourmmip:8080/MMM-Navigate/remote?action=NOTIFICATION¬ification=CW</code> emulates turning rotary clockwise<br> <code>yourmmip:8080/MMM-Navigate/remote?action=NOTIFICATION¬ification=PRESSED</code> emulates pressing rotary encoder<br> <code>yourmmip:8080/MMM-Navigate/remote?notification=SHELLCOMMAND&action=sudo%20shutdown%20-h%20now</code> send command to shutdown your pi
Version
1.6 Changelog:
- fix rebuild step process (thanks to sdetweil) 1.5 Changelog:
- minor bugfixes
1.4 Changelog:
- changed code for better recognition of the rotary encoder
- changed code enables faster movement of the rotary
1.3 Changelog:
- added some functions to no longer have a dependency to MMM-Remote-Control
- SHELLCOMMAND
- module is now listening to <code>yourmmip:8080/MMM-Navigate/remote?</code>
1.2 Changelog:
- added lock icon next to navigation alias, if locked
- code cleaned
1.1 Changelog:
- added ability to send notifications to MMM-Navigate by other modules
- added locked mode, so you can put two(2) actions in one(1) navigation link which belong together (like PAGE_INCREMENT and PAGE_DECREMENT). More details see Configuration options (Action).
- modified css, so locked mode is visual (red frame when locked) in MM
- added second click confirmation notification for SHELLCOMMAND
1.0 initial release